
Control Systems Engineering
7th Edition
ISBN: 9781118170519
Author: Norman S. Nise
Publisher: WILEY
expand_more
expand_more
format_list_bulleted
Concept explainers
Videos
Textbook Question
Chapter 5, Problem 38P
State Space SS
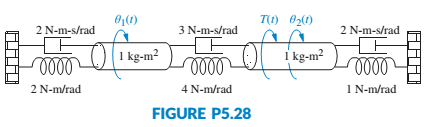
38. Consider the rotational
a. Represent the system as a signal-flow graph.
b. Represent the system in state space if the output is
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
(Read Image)
47
14
16
12
34
10
12
12
33
3. A steam power plant has an average monthly net power delivery of 740 MW over the course of
a year. This power delivery is accomplished by burning coal in the boiler. The coal has a heating
value of 9150 Btu/lbm. The cost of the coal is $14.20/ton. The overall thermal efficiency of the
plant is,
nth
=
Wnet
Qboiler
=
0.26 = 26%
Determine the annual cost of the coal required to deliver the given average monthly power.
Chapter 5 Solutions
Control Systems Engineering
Ch. 5 - Prob. 1RQCh. 5 - Name three basic forms for interconnecting...Ch. 5 - For each of the forms in Question 2, state...Ch. 5 - Besides knowing the basic forms as discussed in...Ch. 5 - For a simple, second-order feedback control system...Ch. 5 - Prob. 6RQCh. 5 - Prob. 7RQCh. 5 - How are summing junctions shown on a signal-flow...Ch. 5 - If a forward path touched all closed loops, what...Ch. 5 - Name five representations of systems in state...
Ch. 5 - Prob. 11RQCh. 5 - Which form of the state-space representation leads...Ch. 5 - When the system matrix is diagonal, what...Ch. 5 - What terms lie along the diagonal for a system...Ch. 5 - Prob. 15RQCh. 5 - Prob. 16RQCh. 5 - For what kind of system would you use the observer...Ch. 5 - Describe state-vector transformations from the...Ch. 5 - Prob. 19RQCh. 5 - Prob. 20RQCh. 5 - Prob. 21RQCh. 5 - Find the closed-loop transfer function, T(s) =...Ch. 5 - Find the equivalent transfer function, T(s) =...Ch. 5 - Reduce the system shown in Figure P5.4 to a single...Ch. 5 - Reduce the block diagram shown in Figure P5.6 to a...Ch. 5 - Find the unity feedback system that is equivalent...Ch. 5 - 8. Given the block diagram of a system shown in...Ch. 5 - 9. Reduce the block diagram shown in Figure P5.9...Ch. 5 - Reduce the block diagram shown in Figure P5.10 to...Ch. 5 - 11. For the system shown in Figure P5.11, find the...Ch. 5 - 12. For the system shown in Figure P5.12, find the...Ch. 5 - Prob. 13PCh. 5 - For the system of Figure P5.14, find the value of...Ch. 5 - 15. For the system shown in Figure P5.15, find K...Ch. 5 - For the system of Figure P5.16, find the values of...Ch. 5 - Find the following for the system shown in Figure...Ch. 5 - 18. For the system shown in Figure P5.18, find ,...Ch. 5 - Prob. 19PCh. 5 - Prob. 20PCh. 5 - Find the transfer function G(s) = Eo(s)/T(s) for...Ch. 5 - Prob. 22PCh. 5 - Prob. 23PCh. 5 - State Space SS
24. Given the system below, draw a...Ch. 5 - Prob. 25PCh. 5 - Using Mason’s rule, find the transfer function,...Ch. 5 - Using Mason’s rule, find the transfer function,...Ch. 5 - Prob. 28PCh. 5 - Use block diagram reduction to find the transfer...Ch. 5 - State Space SS 30. Represent the following systems...Ch. 5 - Prob. 31PCh. 5 - State Space SS 32. Repeat Problem 31 and represent...Ch. 5 - Prob. 33PCh. 5 - Prob. 34PCh. 5 - Repeat Problem 34 for the system shown in Figure...Ch. 5 - Prob. 37PCh. 5 - State Space SS 38. Consider the rotational...Ch. 5 - Prob. 40PCh. 5 - Prob. 41PCh. 5 - State Space SS
42. Consider the subsystems shown...Ch. 5 - Prob. 43PCh. 5 - Prob. 44PCh. 5 - State Space SS
45. Diagonalize the following...Ch. 5 - Prob. 46PCh. 5 - Prob. 48PCh. 5 - Prob. 51PCh. 5 - Figure P5.33 shows a noninverting operational...Ch. 5 - Figure P5.34 shows the diagram of au inverting...Ch. 5 - Prob. 54PCh. 5 - A car active suspension system adds an active...Ch. 5 - Prob. 58PCh. 5 - Prob. 60PCh. 5 - Some medical procedures require the insertion of a...Ch. 5 - Prob. 62PCh. 5 - Prob. 64PCh. 5 - Prob. 65PCh. 5 - The purpose of an Automatic Voltage Regulator is...Ch. 5 - 68. Integrated circuits are manufactured through a...Ch. 5 - Prob. 69PCh. 5 - Prob. 72PCh. 5 - Prob. 73PCh. 5 - Assume ideal operational amplifiers in the circuit...Ch. 5 - Parabolic trough collector. Effective controller...
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- 47 14 16 12 34 10 12 12 33arrow_forward= The forces F₁ = 590 lb, F₂ = 380 lb, F3 = 240 lb and F 330 lb. Determine the forces in each member of the truss. Use positive values to indicate tension and negative values to indicate compression. a a a D b F₁ A 000 B. 779977 F₂V H G E F4 b BY NC SA 2013 Michael Swanbom Values for dimensions on the figure are given in the following table. Note the figure may not be to scale. Variable Value a 6 ft b 10.1 ft The force in member AB is lb. The force in member AH is lb. The force in member GH is lb. The force in member BH is lb. The force in member BC is lb. The force in member BG is lb. The force in member EG is lb. The force in member CD is lb. The force in member DE is lb. The force in member CE is lb. The force in member CG is lb.arrow_forwardMultiple Choice Circle the best answer to each statement. 1. Which type of surface deviation is controlled by a cy- lindricity tolerance but not by a circularity tolerance? A. B. C. Ovality Taper Lobing D. None of the above 2. When verifying a cylindricity tolerance, the inspec- tion method must be able to collect a set of points and determine the: A. Distance between two coaxial cylinders that con- tain the set of points B. Cylinder that circumscribes the set of points C. Cylinder that inscribes the set of points D. Distance between two coaxial circles that contain the set of points 3. Where Rule #1 applies to a cylindrical regular feature of size, the tolerance value of a cylindricity tolerance applied to the feature of size must be tolerance. A. Less than B. Equal to C. Greater than D. None of the above the size 4. Which of the following modifiers may be applied with a cylindricity tolerance? A. M B. C. ℗ D. Ø 5. Which geometric tolerance can provide an indirect cylindricity…arrow_forward
- The beam AB is attached to the wall in the xz plane by a fixed support at A. A force of F = (−129î + 69.0ĵ + 3591) N is applied to the end of the beam at B. The weight of the beam can be modeled with a uniform distributed load of intensity w = 85.0 N/m acting in the negative z direction along its entire length. Find the support reactions at A. Z с A b a B F y Cc 10 BY NC SA 2016 Eric Davishahl X Values for dimensions on the figure are given in the following. table. Note the figure may not be to scale. Variable Value a 5.60 m b 5.00 m C 3.70 m A II = MA = ( m 2.> ~.> + + k) N k) N-arrow_forwardneed help?arrow_forwardA bent pipe is attached to a wall with brackets as shown. A force of F = 180 lb is applied to the end of the tube with direction indicated by the dimensions in the figure. Determine the support reactions at the brackets B, C, and D. Model these brackets as journal bearings (only force reactions perpendicular to the axis of the tube) and neglect couple moment reactions. Assume the distance between the supports at B and C and the tube bends nearby are negligible such that the support at C is directly above the support at D and the dimension g gives the distance between supports B and C. Enter your answers in Cartesian components. 2013 Michael Swanbom cc 10 BY NC SA g h א B 8° У A C x каж Values for dimensions on the figure are given in the table below. Note the figure may not be to scale. Variable Value a 6.72 in b 11.8 in с 14.8 in d 42.0 in h 26.6 in g 28.0 in → The reaction at B is B = lb. The reaction at C is C = lb. The reaction at D is D = lb. + << + + 2. + + 557 〈んarrow_forward
- The force F1 = 10 kN, F2 = 10 kN, F3 = 10 kN, F4 = 5 KN are acting on the sttructure shown. Determine the forces in the members specified below. Use positive values to indicate tension and negative values to indicate compression. F2 D b F1 F3 C E b F4 b B F a G Values for dimensions on the figure are given in the following table. Note the figure may not be to scale. Variable Value a 3 m b 4 m The force in member BC is KN. The force in member BE is KN. The force in member EF is KN.arrow_forwardh = The transmission tower is subjected to the forces F₁ 3.6 KN at 50° and F2 = 3.3 kN at = 35°. Determine the forces in members BC, BP, PQ, PC, CD, DP and NP. Use positive values to indicate tension and negative values to indicate compression. 不 кажаж в *а*аж E N M d d IF, c B CENTER LINE S อ K F₂ Kbb cc 10 BY NC SA 2013 Michael Swanbom Values for dimensions on the figure are given in the following table. Note the figure may not be to scale. Variable Value a 1.7 m b 4.9 m с 3 m d 5.2 m h 8.4 m Values for dimensions on the figure are given in the following table. Note the figure may not be to scale. Variable Value a 1.7 m 4.9 m с 3 m d 5.2 m h 8.4 m The force in member BC is KN. The force in member BP is KN. The force in member PQ is KN. The force in member PC is KN. The force in member CD is KN. The force in member DP is KN. The force in member NP is KN.arrow_forwardنصاف Sheet Asteel bar of rectangular cross section with dimension Shown in fig. below. This bar is as Connected toawell. Using welded Join a long the sides als only find the weld size (h). Where: Tall = 35 MN/M² F=213.30 answer/h= 4.04 ☐ Yomm Soomm 100mmarrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY
Introduction to Kinematics; Author: LearnChemE;https://www.youtube.com/watch?v=bV0XPz-mg2s;License: Standard youtube license