
Control Systems Engineering
7th Edition
ISBN: 9781118170519
Author: Norman S. Nise
Publisher: WILEY
expand_more
expand_more
format_list_bulleted
Concept explainers
Videos
Textbook Question
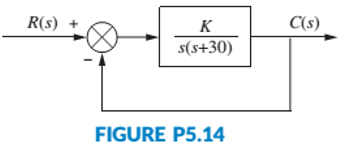
Chapter 5, Problem 14P
For the system of Figure P5.14, find the value of K that yields 10% overshoot for a step input. [Section: 5.3]
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
Find the equivalent mass of the rocker arm assembly with respect to the x coordinate.
k₁
mi
m2
k₁
2. Figure below shows a U-tube manometer open at both ends and containing a column of liquid
mercury of length l and specific weight y. Considering a small displacement x of the manometer
meniscus from its equilibrium position (or datum), determine the equivalent spring constant associated
with the restoring force.
Datum
Area, A
1. The consequences of a head-on collision of two automobiles can be studied by considering the
impact of the automobile on a barrier, as shown in figure below. Construct a mathematical model (i.e.,
draw the diagram) by considering the masses of the automobile body, engine, transmission, and
suspension and the elasticity of the bumpers, radiator, sheet metal body, driveline, and engine
mounts.
Chapter 5 Solutions
Control Systems Engineering
Ch. 5 - Prob. 1RQCh. 5 - Name three basic forms for interconnecting...Ch. 5 - For each of the forms in Question 2, state...Ch. 5 - Besides knowing the basic forms as discussed in...Ch. 5 - For a simple, second-order feedback control system...Ch. 5 - Prob. 6RQCh. 5 - Prob. 7RQCh. 5 - How are summing junctions shown on a signal-flow...Ch. 5 - If a forward path touched all closed loops, what...Ch. 5 - Name five representations of systems in state...
Ch. 5 - Prob. 11RQCh. 5 - Which form of the state-space representation leads...Ch. 5 - When the system matrix is diagonal, what...Ch. 5 - What terms lie along the diagonal for a system...Ch. 5 - Prob. 15RQCh. 5 - Prob. 16RQCh. 5 - For what kind of system would you use the observer...Ch. 5 - Describe state-vector transformations from the...Ch. 5 - Prob. 19RQCh. 5 - Prob. 20RQCh. 5 - Prob. 21RQCh. 5 - Find the closed-loop transfer function, T(s) =...Ch. 5 - Find the equivalent transfer function, T(s) =...Ch. 5 - Reduce the system shown in Figure P5.4 to a single...Ch. 5 - Reduce the block diagram shown in Figure P5.6 to a...Ch. 5 - Find the unity feedback system that is equivalent...Ch. 5 - 8. Given the block diagram of a system shown in...Ch. 5 - 9. Reduce the block diagram shown in Figure P5.9...Ch. 5 - Reduce the block diagram shown in Figure P5.10 to...Ch. 5 - 11. For the system shown in Figure P5.11, find the...Ch. 5 - 12. For the system shown in Figure P5.12, find the...Ch. 5 - Prob. 13PCh. 5 - For the system of Figure P5.14, find the value of...Ch. 5 - 15. For the system shown in Figure P5.15, find K...Ch. 5 - For the system of Figure P5.16, find the values of...Ch. 5 - Find the following for the system shown in Figure...Ch. 5 - 18. For the system shown in Figure P5.18, find ,...Ch. 5 - Prob. 19PCh. 5 - Prob. 20PCh. 5 - Find the transfer function G(s) = Eo(s)/T(s) for...Ch. 5 - Prob. 22PCh. 5 - Prob. 23PCh. 5 - State Space SS
24. Given the system below, draw a...Ch. 5 - Prob. 25PCh. 5 - Using Mason’s rule, find the transfer function,...Ch. 5 - Using Mason’s rule, find the transfer function,...Ch. 5 - Prob. 28PCh. 5 - Use block diagram reduction to find the transfer...Ch. 5 - State Space SS 30. Represent the following systems...Ch. 5 - Prob. 31PCh. 5 - State Space SS 32. Repeat Problem 31 and represent...Ch. 5 - Prob. 33PCh. 5 - Prob. 34PCh. 5 - Repeat Problem 34 for the system shown in Figure...Ch. 5 - Prob. 37PCh. 5 - State Space SS 38. Consider the rotational...Ch. 5 - Prob. 40PCh. 5 - Prob. 41PCh. 5 - State Space SS
42. Consider the subsystems shown...Ch. 5 - Prob. 43PCh. 5 - Prob. 44PCh. 5 - State Space SS
45. Diagonalize the following...Ch. 5 - Prob. 46PCh. 5 - Prob. 48PCh. 5 - Prob. 51PCh. 5 - Figure P5.33 shows a noninverting operational...Ch. 5 - Figure P5.34 shows the diagram of au inverting...Ch. 5 - Prob. 54PCh. 5 - A car active suspension system adds an active...Ch. 5 - Prob. 58PCh. 5 - Prob. 60PCh. 5 - Some medical procedures require the insertion of a...Ch. 5 - Prob. 62PCh. 5 - Prob. 64PCh. 5 - Prob. 65PCh. 5 - The purpose of an Automatic Voltage Regulator is...Ch. 5 - 68. Integrated circuits are manufactured through a...Ch. 5 - Prob. 69PCh. 5 - Prob. 72PCh. 5 - Prob. 73PCh. 5 - Assume ideal operational amplifiers in the circuit...Ch. 5 - Parabolic trough collector. Effective controller...
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- 3.) 15.40 – Collar B moves up at constant velocity vB = 1.5 m/s. Rod AB has length = 1.2 m. The incline is at angle = 25°. Compute an expression for the angular velocity of rod AB, ė and the velocity of end A of the rod (✓✓) as a function of v₂,1,0,0. Then compute numerical answers for ȧ & y_ with 0 = 50°.arrow_forward2.) 15.12 The assembly shown consists of the straight rod ABC which passes through and is welded to the grectangular plate DEFH. The assembly rotates about the axis AC with a constant angular velocity of 9 rad/s. Knowing that the motion when viewed from C is counterclockwise, determine the velocity and acceleration of corner F.arrow_forward500 Q3: The attachment shown in Fig.3 is made of 1040 HR. The static force is 30 kN. Specify the weldment (give the pattern, electrode number, type of weld, length of weld, and leg size). Fig. 3 All dimension in mm 30 kN 100 (10 Marks)arrow_forward
- (read image) (answer given)arrow_forwardA cylinder and a disk are used as pulleys, as shown in the figure. Using the data given in the figure, if a body of mass m = 3 kg is released from rest after falling a height h 1.5 m, find: a) The velocity of the body. b) The angular velocity of the disk. c) The number of revolutions the cylinder has made. T₁ F Rd = 0.2 m md = 2 kg T T₂1 Rc = 0.4 m mc = 5 kg ☐ m = 3 kgarrow_forward(read image) (answer given)arrow_forward
- 11-5. Compute all the dimensional changes for the steel bar when subjected to the loads shown. The proportional limit of the steel is 230 MPa. 265 kN 100 mm 600 kN 25 mm thickness X Z 600 kN 450 mm E=207×103 MPa; μ= 0.25 265 kNarrow_forwardT₁ F Rd = 0.2 m md = 2 kg T₂ Tz1 Rc = 0.4 m mc = 5 kg m = 3 kgarrow_forward2. Find a basis of solutions by the Frobenius method. Try to identify the series as expansions of known functions. (x + 2)²y" + (x + 2)y' - y = 0 ; Hint: Let: z = x+2arrow_forward
- 1. Find a power series solution in powers of x. y" - y' + x²y = 0arrow_forward3. Find a basis of solutions by the Frobenius method. Try to identify the series as expansions of known functions. 8x2y" +10xy' + (x 1)y = 0 -arrow_forwardHello I was going over the solution for this probem and I'm a bit confused on the last part. Can you please explain to me 1^4 was used for the Co of the tubular cross section? Thank you!arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of Electromagnetics
Mechanical Engineering
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:9780134319650
Author:Russell C. Hibbeler
Publisher:PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:9781259822674
Author:Yunus A. Cengel Dr., Michael A. Boles
Publisher:McGraw-Hill Education
Control Systems Engineering
Mechanical Engineering
ISBN:9781118170519
Author:Norman S. Nise
Publisher:WILEY
Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:9781337093347
Author:Barry J. Goodno, James M. Gere
Publisher:Cengage Learning
Engineering Mechanics: Statics
Mechanical Engineering
ISBN:9781118807330
Author:James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:WILEY
Introduction to Undamped Free Vibration of SDOF (1/2) - Structural Dynamics; Author: structurefree;https://www.youtube.com/watch?v=BkgzEdDlU78;License: Standard Youtube License