Videos
The electric circuit shown below is designed to measure the temperature of the gas in a chamber.
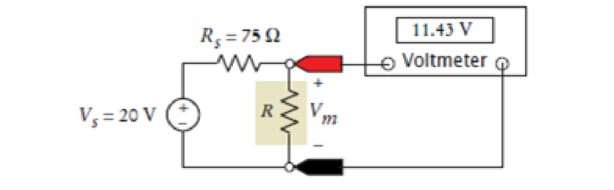
The resistor R represents a temperature sensor enclosed in the chamber. The resistance R, in Ω, is related to the temperature T, in °C, by the equation
In this device, assume R0 = 100 Ω and k = 0.5. The voltmeter displays the value of the voltage, Vm, across the sensor. This voltage Vm indicates the temperature, T, of the gas according to the equation
Suppose the voltmeter voltage is constrained to the range Vmin = 12 volts ≤ Vm <, Vmax = 18 volts. Write a
Want to see the full answer?
Check out a sample textbook solution
Chapter 3 Solutions
Big Java Late Objects
Additional Engineering Textbook Solutions
Electric Circuits. (11th Edition)
Thinking Like an Engineer: An Active Learning Approach (4th Edition)
Starting Out with C++ from Control Structures to Objects (9th Edition)
Java How to Program, Early Objects (11th Edition) (Deitel: How to Program)
SURVEY OF OPERATING SYSTEMS
Mechanics of Materials (10th Edition)


 C++ for Engineers and ScientistsComputer ScienceISBN:9781133187844Author:Bronson, Gary J.Publisher:Course Technology Ptr
C++ for Engineers and ScientistsComputer ScienceISBN:9781133187844Author:Bronson, Gary J.Publisher:Course Technology Ptr Programming Logic & Design ComprehensiveComputer ScienceISBN:9781337669405Author:FARRELLPublisher:Cengage
Programming Logic & Design ComprehensiveComputer ScienceISBN:9781337669405Author:FARRELLPublisher:Cengage Programming with Microsoft Visual Basic 2017Computer ScienceISBN:9781337102124Author:Diane ZakPublisher:Cengage Learning
Programming with Microsoft Visual Basic 2017Computer ScienceISBN:9781337102124Author:Diane ZakPublisher:Cengage Learning EBK JAVA PROGRAMMINGComputer ScienceISBN:9781337671385Author:FARRELLPublisher:CENGAGE LEARNING - CONSIGNMENTNp Ms Office 365/Excel 2016 I NtermedComputer ScienceISBN:9781337508841Author:CareyPublisher:Cengage
EBK JAVA PROGRAMMINGComputer ScienceISBN:9781337671385Author:FARRELLPublisher:CENGAGE LEARNING - CONSIGNMENTNp Ms Office 365/Excel 2016 I NtermedComputer ScienceISBN:9781337508841Author:CareyPublisher:Cengage C++ Programming: From Problem Analysis to Program...Computer ScienceISBN:9781337102087Author:D. S. MalikPublisher:Cengage Learning
C++ Programming: From Problem Analysis to Program...Computer ScienceISBN:9781337102087Author:D. S. MalikPublisher:Cengage Learning