(a)
The values of gain
Case 1: For
Case 2: For
Case 3: For a root separation factor of 10.
Answer to Problem 10.22P
The values of gains for the PI controller are as follows:
Case 1: For
Case 2: For
Case 3: For a root separation factor of 10,
Explanation of Solution
Given:
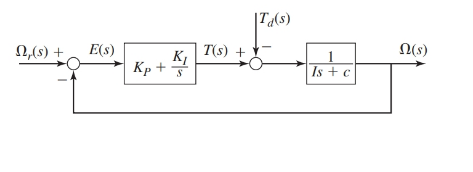
The proportional integral controller of the first order plant is as shown below:
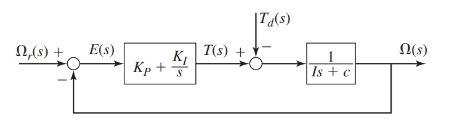
Where, the parameter values are as given:
Also, the performance specifications require the time constant of the system to be
Concept Used:
- The transfer functions for the block diagram are as shown below:
- For a second order system having a characteristic equation of the form
- For a second order system, if the root separation factor is K then, we have following conclusions for the roots and their corresponding time constant, that is
For roots
Also, the corresponding time constant for the system would be
The corresponding time constants of the system would be:
Calculation:
From the block diagram as shown, the transfer functions are as:
Therefore, the characteristic equation for the system is:
On putting the values of parameters in this expression of characteristic equation:
On comparing this equation with form
Undamped natural frequency:
Damping ratio:
Thus, the time constant for the system is:
As the performance specifications require the time constant of the system to be
Therefore, at
Case 1. When
Since,
Case 2. When
Since,
Case 3. When the root separation factor is 10.
For this value of the root separation factor
As given in the question system, performance requires time constant to be 0.2seconds or say the dominant time constant to be 0.2 seconds, then the secondary time constant would be 0.02 seconds. Therefore, the characteristic roots corresponding to these time constants would be:
Thus, the corresponding characteristic equation for the system will be:
On comparing this equation with
And
Conclusion:
The values of gains for the PI controller areas follows:
Case 1. For
Case 2. For
Case 3. For a root separation factor of 10,
(b)
To plot:
The response
Answer to Problem 10.22P
The response
Explanation of Solution
Given:
The proportional integral controller of first order plant is as shown below:
Where, the parameter values are as given:
Also, the performance specifications require the time constant of the system to be
The values of gains for the PI controller are as follows:
Case 1. For
Case 2. For
Case 3. For a root separation factor of 10,
Concept Used:
- The transfer functions for the block diagram are as shown below:
Calculation:
From the block diagram as shown, the transfer functions are as:
Therefore, the response
On putting the values of parameters in this expression of characteristic equation:
Case 1. When
Since,
Therefore, for unit-step command response
On simplifying this response of
On taking inverse Laplace transform of this, we have
Case 2. When
Since,
Therefore, for unit-step command response
On simplifying this response of
On taking inverse Laplace transform of this, we have
Case 3. When the root separation factor is 10.
That is, the gain values are
Since,
Therefore, for unit-step command response
On simplifying this response of
On taking inverse Laplace transform of this, we have
On plotting the responses
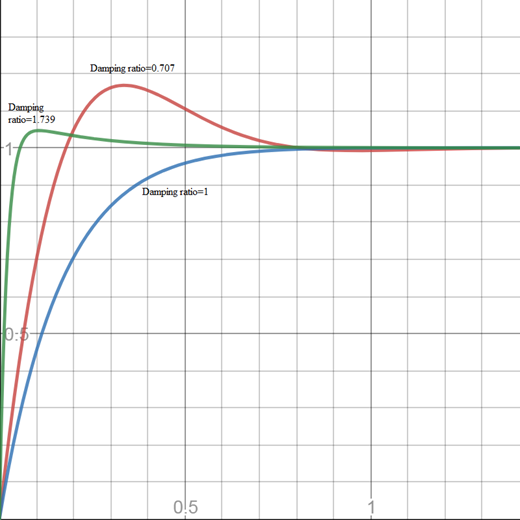
Figure 1
From Figure 1,it is observed that there is a high overshoot in the responseat the damping ratio
Conclusion:
Therefore, the response
Want to see more full solutions like this?
Chapter 10 Solutions
System Dynamics

- Using the isothermal transformation diagram for a 1.13 wt% C steel alloy (Figure 10.39), determine the final microstructure (in terms of just the microconstituents present) of a small specimen that has been subjected to the following time-temperature treatments. In each case assume that the specimen begins at 920°C (1690°F) and that it has been held at this temperature long enough to have achieved a complete and homogeneous austenitic structure. (a) Rapidly cool to 250°C (480°F), hold for 103 s, then quench to room temperature. (b) Rapidly cool to 775°C (1430°F), hold for 500 s, then quench to room temperature. (c) Rapidly cool to 400°C (750°F), hold for 500 s, then quench to room temperature. (d) Rapidly cool to 700°C (1290°F), hold at this temperature for 105 s, then quench to room temperature. (e) Rapidly cool to 650°C (1200°F), hold at this temperature for 3 s, rapidly cool to 400°C (750°F), hold for 25 s, then quench to room temperature. (f) Rapidly cool to 350°C (660°F), hold for…arrow_forwardHow to solve this?arrow_forwardA start-up company wants to convert an ICE vehicle into an electric vehicle with the following specification. Power: 250 (HP) horsepower, (note: 1HP = 745 W) Range: 300-miles Fuel economy: 33.5 kilometers per gallon of gasoline. Efficiency of the ICE: 25% Energy Conversion: One gallon of gasoline at 100% efficiency is equal to 33.5 kWh/gallon). a)Calculate the EV consumption rate as Wh/km and find the total energy of the battery pack in KWh to replace the internal combustion engine. b)Design an 8-module battery pack for this full electric vehicle without compromising its range and performance (power). Use commercially available cylindrical cells lithium cell with 20Ah capacity and 3.125 V average voltage. Cell dimensions are 5cm diameter and 10 cm height. The electric motor requires 250 V input that will be provided directly from the battery pack, Report the configuration of each module in…arrow_forward
- "11-17 The shaft shown in Figure P11-3 was designed in Problem 10-17. For the data in the row(s) assigned from Table P11-1, and the corresponding diameter of shaft found in Problem 10-17, design suitable bearings to support the load for at least 1E8 cycles at 1800 rpm. State all assumptions. (a) Using hydrodynamically lubricated bronze sleeve bearings with Ox = 15, 11d=0.75, and a clearance ratio of 0.001. ✓ ✓ cast-iron roller FIGURE P11-3 Shaft Design for Problems 11-17 b gear key assume bearings act as simple supports 11-19 The shaft shown in Figure P11-4 was designed in Problem 10-19. For the data in the row(s) assigned from Table P11-1, and the corresponding diameter of shaft found in Problem 10-19, design suitable bearings to support the load for at least 5E8 cycles at 1200 rpm. State all assumptions. (a) Using hydrodynamically lubricated bronze sleeve bearings with Oy = 40, 1/d=0.80, and a clearance ratio of 0.002 5. gear gear key FIGURE P11-4 Shaft Design for Problems 11-19 and…arrow_forwardFor the frame below calculate the bending moment at point R. Take P=40 and note that this value is used for both the loads and the lengths of the members of the frame. 2.5P- A Q B R С 45 degrees ✗ ✗ P i 19 Кур -2P- 4PRN -P- -arrow_forwardCalculate the bending moment at the point D on the beam below. Take F=79 and remember that this quantity is to be used to calculate both forces and lengths. 15F 30F A сarrow_forwardShow work on how to obtain P2 and T2. If using any table, please refer to it. If applying interpolation method, please show the work.arrow_forwardcast-iron roller FIGURE P11-3 Shaft Design for Problems 11-17 Chapter 11 BEARINGS AND LUBRICATION 677 gear key P assume bearings act as simple supports 11-18 Problem 7-18 determined the half-width of the contact patch for a 1.575-in-dia steel cylinder, 9.843 in long, rolled against a flat aluminum plate with 900 lb of force to be 0.0064 in. If the cylinder rolls at 800 rpm, determine its lubrication condition with ISO VG 1000 oil at 200°F. R₁ = 64 μin (cylinder); R₁ = 32 μin (plate). 11-19 The shaft shown in Figure P11-4 was designed in Problem 10-19. For the data in the row(s) assigned from Table P11-1, and the corresponding diameter of shaft found in Problem 10-19, design suitable bearings to support the load for at least 5E8 cycles at 1200 rpm. State all assumptions. (a) (b) Using hydrodynamically lubricated bronze sleeve bearings with ON = 40, 1/ d=0.80, and a clearance ratio of 0.002 5. Using deep-groove ball bearings for a 10% failure rate. *11-20 Problem 7-20 determined the…arrow_forwardCalculate the shear force at the point D on the beam below. Take F=19 and remember that this quantity is to be used to calculate both forces and lengths. 15F A сarrow_forward"II-1 The shaft shown in Figure P11-I was designed in Problem 10-1. For the data in the row(s) assigned from Table P11-1, and the corresponding diameter of shaft found in Problem 10-1, design suitable bearings to support the load for at least 7E7 cycles at 1500 rpm. State all assumptions. (a) Using hydrodynamically lubricated bronze sleeve bearings with Ox = 20, 1/d=1.25, and a clearance ratio of 0.001 5. assume bearings act as simple supports FIGURE P11-1 Shaft Design for Problem 11-1 11-2 The shaft shown in Figure P11-2 was designed in Problem 10-2. For the data in the row(s) assigned from Table P11-1, and the corresponding diameter of shaft found in Problem 10-2, design suitable bearings to support the load for at least 3E8 cycles at 2.500 rpm. State all assumptions. (a) Using hydrodynamically lubricated bronze sleeve bearings with ON=30, 1/d=1.0, and a clearance ratio of 0.002. FIGURE P11-2 Shaft Design for Problem 11-2 Table P11-1 Data for Problems assume bearings act as simple…arrow_forwardFor the frame below, calculate the shear force at point Q. Take P=13 and note that this value is used for both the loads and the lengths of the members of the frame. 1 A Q ✗ 19 KBP 2.5P- B R C 45 degrees ✗ 1 .2P- 4PhN -P→arrow_forwardCalculate the Bending Moment at point D in the frame below. Leave your answer in Nm (newton-metres) J J A 2m 2m <2m х D 不 1m X E 5m 325 Nm 4x 400N/marrow_forwardarrow_back_iosSEE MORE QUESTIONSarrow_forward_iosRecommended textbooks for you
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University PressMechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSONThermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill EducationControl Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEYMechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage LearningEngineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY