Introductory Mathematics for Engineering Applications
1st Edition
ISBN: 9781118141809
Author: Nathan Klingbeil
Publisher: WILEY
expand_more
expand_more
format_list_bulleted
Concept explainers
Videos
Textbook Question
Chapter 6, Problem 10P
Repeat problem P6-8 for the sinusoidal motion shown in Fig.P6.10.
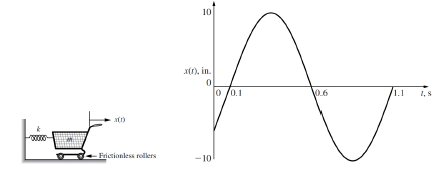
Figure P6.10 Motion of a spring-mass system in the x-.direction for problem P6-10.
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
these are solutions to a tutorial that was done and im a little lost. can someone please explain to me how these iterations function, for example i Do not know how each set of matrices produces a number if someine could explain how its done and provide steps it would be greatly appreciated thanks.
Q1) Classify the following statements as a true or false statements
a. Any ring with identity is a finitely generated right R module.-
b. An ideal 22 is small ideal in Z
c. A nontrivial direct summand of a module cannot be large or small submodule
d. The sum of a finite family of small submodules of a module M is small in M
A module M 0 is called directly indecomposable if and only if 0 and M are
the only direct summands of M
f. A monomorphism a: M-N is said to split if and only if Ker(a) is a direct-
summand in M
& Z₂ contains no minimal submodules
h. Qz is a finitely generated module
i. Every divisible Z-module is injective
j. Every free module is a projective module
Q4) Give an example and explain your claim in each case
a) A module M which has two composition senes 7
b) A free subset of a modale
c) A free module
24
d) A module contains a direct summand submodule 7,
e) A short exact sequence of modules 74.
Prove that
Σ
prime p≤x
p=3 (mod 10)
1
Ρ
=
for some constant A.
log log x + A+O
1
log x
"
Chapter 6 Solutions
Introductory Mathematics for Engineering Applications
Ch. 6 - The tip of a one-link robot is located at =0 at...Ch. 6 - The tip of a one-link robot is located at =/6rad...Ch. 6 - The tip of a one-link robot is located at =/4rad...Ch. 6 - The tip of a one-link robot is located at =/2rad...Ch. 6 - The tip of a one-link robot is located at =3/4rad...Ch. 6 - The tip of a one-link robot is located at =rad at...Ch. 6 - A spring-mass system moving in the y-direction has...Ch. 6 - A spring-mass system moving in the x-direction has...Ch. 6 - Repeat problem P6-8 for the sinusoidal motion...Ch. 6 - Repeat problem P6-8 for the sinusoidal motion...
Ch. 6 - A spring-mass system is displaced x=10 cm and let...Ch. 6 - Suppose the spring-mass system of problem P6-11 is...Ch. 6 - Figure P.13 A spring-mass system for problem...Ch. 6 - The position of a spring-mass system shown in Fig....Ch. 6 - The position of a spring-mass system shown in Fig....Ch. 6 - A simple pendulum of length L=100 cm is shown in...Ch. 6 - Repeat problem P6-16 if L=10 in, and...Ch. 6 - A sinusoidal current i(t)=0.1sin(100t) amps is...Ch. 6 - A sinusoidal current i(t)=200cos(120t+14.86) mA is...Ch. 6 - A series RL circuit is subjected to a sinusoidal...Ch. 6 - A series RL circuit is subjected to a sinusoidal...Ch. 6 - A sinusoidal voltage (t)=10sin(1000t)V is applied...Ch. 6 - A parallel RL circuit is subjected to a sinusoidal...Ch. 6 - A parallel RL circuit is subjected to a sinusoidal...Ch. 6 - Consider the RC circuit shown in Fig. P6.25, where...Ch. 6 - Consider the RC circuit shown in Fig.P6.25, where...Ch. 6 - Two voltages 1(t)=10sin(100t45)V and...Ch. 6 - Repeat problem P6-27 if 1(t)=10cos(100t+90)V and...Ch. 6 - Two voltages 1(t)=102sin(500t34)V and...Ch. 6 - A pair of springs and masses vibrate under simple...Ch. 6 - Suppose the positions of the masses in problem...Ch. 6 - Two oscillating masses are connected by a spring...Ch. 6 - Now assume that the positions of two masses in...Ch. 6 - A manufacturing plant employs a heater and a...Ch. 6 - Repeat problem P6-34 if H(t)=100sin(120t)V and...Ch. 6 - In the three-phase circuit shown in Fig.P.36....Ch. 6 - In the three-phase circuit shown in Fig.P.36....Ch. 6 - In the three-phase circuit shown in Fig.P.36....Ch. 6 - The Hip implant shown in Fig. P6.39 is subjected...Ch. 6 - Repeat problem P6-3 if F(t)=15sin(10t)+75N.
Additional Math Textbook Solutions
Find more solutions based on key concepts
In Exercises 5-36, express all probabilities as fractions.
23. Combination Lock The typical combination lock us...
Elementary Statistics
Derivatives involving ln x Find the following derivatives. 17. ddx((x2+1)lnx)
Calculus: Early Transcendentals (2nd Edition)
Children of First Ladies This list represents the number of children for the first six “first ladies” of the Un...
Introductory Statistics
The equivalent expression of x(y+z) by using the commutative property.
Calculus for Business, Economics, Life Sciences, and Social Sciences (14th Edition)
have to calculate the difference of the given fraction.
Pre-Algebra Student Edition
Explain the meaning of the term “statistically significant difference” in statistics terminology.
Intro Stats, Books a la Carte Edition (5th Edition)
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, advanced-math and related others by exploring similar questions and additional content below.Similar questions
- Prove that, for x ≥ 2, d(n) n2 log x = B ― +0 X (금) n≤x where B is a constant that you should determine.arrow_forwardProve that, for x ≥ 2, > narrow_forward1 2 21. For the matrix A = 3 4 find AT (the transpose of A). 22. Determine whether the vector @ 1 3 2 is perpendicular to -6 3 2 23. If v1 = (2) 3 and v2 = compute V1 V2 (dot product). .arrow_forward7. Find the eigenvalues of the matrix (69) 8. Determine whether the vector (£) 23 is in the span of the vectors -0-0 and 2 2arrow_forward1. Solve for x: 2. Simplify: 2x+5=15. (x+3)² − (x − 2)². - b 3. If a = 3 and 6 = 4, find (a + b)² − (a² + b²). 4. Solve for x in 3x² - 12 = 0. -arrow_forward5. Find the derivative of f(x) = 6. Evaluate the integral: 3x3 2x²+x— 5. - [dz. x² dx.arrow_forward5. Find the greatest common divisor (GCD) of 24 and 36. 6. Is 121 a prime number? If not, find its factors.arrow_forward13. If a fair coin is flipped, what is the probability of getting heads? 14. A bag contains 3 red balls and 2 blue balls. If one ball is picked at random, what is the probability of picking a red ball?arrow_forward24. What is the value of ¿4, where i 25. Simplify log2 (8). = −1? 26. If P(x) = x³- 2x² + 5x - 10, find P(2). 27. Solve for x: e2x = 7.arrow_forwardarrow_back_iosSEE MORE QUESTIONSarrow_forward_ios
Recommended textbooks for you
 Trigonometry (MindTap Course List)TrigonometryISBN:9781305652224Author:Charles P. McKeague, Mark D. TurnerPublisher:Cengage Learning
Trigonometry (MindTap Course List)TrigonometryISBN:9781305652224Author:Charles P. McKeague, Mark D. TurnerPublisher:Cengage Learning Algebra & Trigonometry with Analytic GeometryAlgebraISBN:9781133382119Author:SwokowskiPublisher:Cengage
Algebra & Trigonometry with Analytic GeometryAlgebraISBN:9781133382119Author:SwokowskiPublisher:Cengage
Trigonometry (MindTap Course List)
Trigonometry
ISBN:9781305652224
Author:Charles P. McKeague, Mark D. Turner
Publisher:Cengage Learning
Algebra & Trigonometry with Analytic Geometry
Algebra
ISBN:9781133382119
Author:Swokowski
Publisher:Cengage
01 - What Is A Differential Equation in Calculus? Learn to Solve Ordinary Differential Equations.; Author: Math and Science;https://www.youtube.com/watch?v=K80YEHQpx9g;License: Standard YouTube License, CC-BY
Higher Order Differential Equation with constant coefficient (GATE) (Part 1) l GATE 2018; Author: GATE Lectures by Dishank;https://www.youtube.com/watch?v=ODxP7BbqAjA;License: Standard YouTube License, CC-BY
Solution of Differential Equations and Initial Value Problems; Author: Jefril Amboy;https://www.youtube.com/watch?v=Q68sk7XS-dc;License: Standard YouTube License, CC-BY