Fundamentals of Electric Circuits
6th Edition
ISBN: 9780078028229
Author: Charles K Alexander, Matthew Sadiku
Publisher: McGraw-Hill Education
expand_more
expand_more
format_list_bulleted
Videos
Textbook Question
Chapter 15.5, Problem 12PP
Graphically convolve the two functions in Fig. 15.14. To show how powerful working in the s-domain is, verify your answer by performing the equivalent operation in the s-domain.
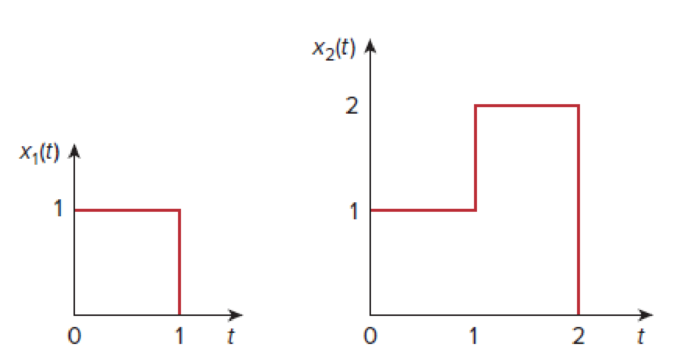
Figure 15.14
Expert Solution & Answer
Want to see the full answer?
Check out a sample textbook solution
Students have asked these similar questions
Don't use ai to answer I will report you answer
Don't use ai to answer I will report you answer
Don't use ai to answer I will report you answer
Chapter 15 Solutions
Fundamentals of Electric Circuits
Ch. 15.2 - Prob. 1PPCh. 15.2 - Prob. 2PPCh. 15.3 - Prob. 3PPCh. 15.3 - Prob. 4PPCh. 15.3 - Prob. 5PPCh. 15.3 - Prob. 6PPCh. 15.3 - Obtain the initial and the final values of...Ch. 15.4 - Prob. 8PPCh. 15.4 - Find f(t) if F(s)=48(s+2)(s+1)(s+3)(s+4)Ch. 15.4 - Obtain g(t) if G(s)=s3+2s+6s(s+1)2(s+3)
Ch. 15.4 - Find g(t) given that G(s)=20(s+1)(s2+4s+13)Ch. 15.5 - Graphically convolve the two functions in Fig....Ch. 15.5 - Given g(t) and f(t) in Fig. 15.20, graphically...Ch. 15.5 - Use convolution to find vo(t) in the circuit of...Ch. 15.6 - Prob. 15PPCh. 15.6 - Prob. 16PPCh. 15 - Prob. 1RQCh. 15 - Prob. 2RQCh. 15 - Prob. 3RQCh. 15 - Prob. 4RQCh. 15 - Prob. 5RQCh. 15 - If F(s) = 1/(s + 2), then f(t) is (a) e2t u(t) (b)...Ch. 15 - Prob. 7RQCh. 15 - Prob. 8RQCh. 15 - Prob. 9RQCh. 15 - Prob. 10RQCh. 15 - Prob. 1PCh. 15 - Prob. 2PCh. 15 - Prob. 3PCh. 15 - Prob. 4PCh. 15 - Prob. 5PCh. 15 - Prob. 6PCh. 15 - Prob. 7PCh. 15 - Prob. 8PCh. 15 - Prob. 9PCh. 15 - Prob. 10PCh. 15 - Find F(s) if: (a) ft=6etcosh2t (b) ft=3te2tsinh4t...Ch. 15 - If g(t) = 4e 2t cos 4t, find G(s).Ch. 15 - Prob. 13PCh. 15 - Prob. 14PCh. 15 - Prob. 15PCh. 15 - Prob. 16PCh. 15 - Prob. 17PCh. 15 - Prob. 18PCh. 15 - Prob. 19PCh. 15 - Prob. 20PCh. 15 - Prob. 21PCh. 15 - Prob. 22PCh. 15 - Prob. 23PCh. 15 - Design a problem to help other students better...Ch. 15 - Let F(s)=18(s+1)(s+2)(s+3) (a) Use the initial and...Ch. 15 - Determine the initial and final values of f(t), if...Ch. 15 - Prob. 27PCh. 15 - Prob. 28PCh. 15 - Prob. 29PCh. 15 - Prob. 30PCh. 15 - Find f(t) for each F(s): (a) 10ss+1s+2s+3 (b)...Ch. 15 - Prob. 32PCh. 15 - Prob. 33PCh. 15 - Prob. 34PCh. 15 - Obtain f(t) for the following transforms: (a)...Ch. 15 - Prob. 36PCh. 15 - Prob. 37PCh. 15 - Prob. 38PCh. 15 - Determine f(t) if: (a)...Ch. 15 - Show that...Ch. 15 - Prob. 41PCh. 15 - Design a problem to help other students better...Ch. 15 - Prob. 43PCh. 15 - Prob. 44PCh. 15 - Given h(t) = 4e2tu(t) and x(t) = (t) 2e 2tu(t),...Ch. 15 - Given the following functions...Ch. 15 - A system has the transfer function...Ch. 15 - Find f(t) using convolution given that: (a)...Ch. 15 - Prob. 49PCh. 15 - Prob. 50PCh. 15 - Given that v(0) = 5 and dv(0)/dt = 10, solve...Ch. 15 - Prob. 52PCh. 15 - Prob. 53PCh. 15 - Design a problem to help other students better...Ch. 15 - Prob. 55PCh. 15 - Solve for v(t) in the integrodifferential equation...Ch. 15 - Prob. 57PCh. 15 - Given that dvdt+2v+50tv()d=4u(t) with v(0) = 1,...Ch. 15 - Solve the integrodifferential equation...Ch. 15 - Prob. 60P
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, electrical-engineering and related others by exploring similar questions and additional content below.Similar questions
- Answer all the questions What is the minimum value of capacitor C1 required such that Vfiltered does not drop below 8 V? Use the design equation(but make sure you use the right “frequency” and the correct ripple voltage). Show your calculations. Display your circuit in circuit js. Display Vsecondary (can use the voltage across the added 100 kΩ resistor) and Vfiltered in a “Combined Scope”. Display VDC in a separate scope: a) Turn on “Max Scale”, “Show Peak Value” and “Show Negative Peak Value”: b) Run the simulator and adjust the window and simulation speed and time step to be able to see a couple of cycles. Include a screen capture Document the minimum and maximum values for Vfiltered in your lab report. Is Vfiltered maintained to be above 8 V? By how much? Why? Explain the waveform shape captured Vfiltered. It may help your understanding to rerun the simulation with C1 removed and compare that waveform for Vfiltered to that capturedarrow_forwardA Three-phase, 3.3 kV, Y connected, 500 kVA, 16 salient pole rotor alternator. The direct and quadrature axis synchronous reactance are 8 and 50/ph respectively. The machine is supplying a load of 350 kVA at 0.8 power factor lagging, Determine: 1. Power angle. 2. Percentage Voltage regulation. 3. Developed power. 4. Reluctance powerarrow_forwardA Three-phase, 12 pole, Y-connected alternator has 108 slots and 14 conductors per slot. The windings are (5/6th) pitched. The flux per pole is 57 mWb distributed sinusoidally over the pole. If the machine runs at 500 r.p.m., determine the following: (a) The frequency of the generated e.m.f., (b) The distribution factor, (c) The pitch factor, and (d) The phase and line values of the generated e.m.f.?arrow_forward
- Many machines, such as lathes, milling machines, and grinders, are equipped with tracers to reproduce the contours of templates. The figure is a schematic diagram of a hydraulic tracer in which the tool duplicates the shape of the template on the workpiece. a) Explain how the system works. b) Draw a block diagram and identify the system's elements. c) Classify the control system. Oil under pressure Template Style Tool Piece of workarrow_forward2. Refrigerators to maintain the product at a given temperature have a control system. a) Explain how the control system is or how you think it should be (Make a diagram). b) Make the typical block diagram of a control system and identify the components in the refrigerator system. c) Classify the control system.arrow_forward3. Internal combustion engines require a cooling system to function properly, which maintains the engine temperature at an appropriate value. Neither too high nor too low. There are several systems to control this temperature, the two best known are: • The classic one that uses a thermostat that regulates the flow of coolant (water), and where the fan is mechanically coupled to the engine. • In more recent vehicles, in addition to the thermostat, a temperature controller is used that turns an electric fan on and off. Select one of the two systems mentioned above and: a) Explain how it works, using diagrams. b) Make the typical block diagram of a feedback control system, identifying the components of the system. c) Classify the control system.arrow_forward
- A 3-phase, star connected, 10 kVA, 380 V, salient pole alternator with direct and quadrature axis reactances of 15 and 8 0/ph respectively, delivers full-load current at 0.8 power factor lagging. Neglect the armature resistance. Determine the following: (a) The load angle, (b) The direct axis and quadrature axis components of armature current, (c) E.M.F induced voltage of the alternator, (d) The voltage regulation, and (e) The developed power by the alternator?arrow_forwardA 2000 kVA,Y- connected alternator gives an open circuit line voltage of 3.3 kV for a field current of 65 A. For same field current the short circuit current is being equal to full load current. Calculate the full load voltage regulation at both 0.8 lagging p.f. and unity p.f., neglect armature resistance?arrow_forwardDon't use ai to answer I will report you answerarrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Introductory Circuit Analysis (13th Edition)Electrical EngineeringISBN:9780133923605Author:Robert L. BoylestadPublisher:PEARSON
Introductory Circuit Analysis (13th Edition)Electrical EngineeringISBN:9780133923605Author:Robert L. BoylestadPublisher:PEARSON Delmar's Standard Textbook Of ElectricityElectrical EngineeringISBN:9781337900348Author:Stephen L. HermanPublisher:Cengage Learning
Delmar's Standard Textbook Of ElectricityElectrical EngineeringISBN:9781337900348Author:Stephen L. HermanPublisher:Cengage Learning Programmable Logic ControllersElectrical EngineeringISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education
Programmable Logic ControllersElectrical EngineeringISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education Fundamentals of Electric CircuitsElectrical EngineeringISBN:9780078028229Author:Charles K Alexander, Matthew SadikuPublisher:McGraw-Hill Education
Fundamentals of Electric CircuitsElectrical EngineeringISBN:9780078028229Author:Charles K Alexander, Matthew SadikuPublisher:McGraw-Hill Education Electric Circuits. (11th Edition)Electrical EngineeringISBN:9780134746968Author:James W. Nilsson, Susan RiedelPublisher:PEARSON
Electric Circuits. (11th Edition)Electrical EngineeringISBN:9780134746968Author:James W. Nilsson, Susan RiedelPublisher:PEARSON Engineering ElectromagneticsElectrical EngineeringISBN:9780078028151Author:Hayt, William H. (william Hart), Jr, BUCK, John A.Publisher:Mcgraw-hill Education,
Engineering ElectromagneticsElectrical EngineeringISBN:9780078028151Author:Hayt, William H. (william Hart), Jr, BUCK, John A.Publisher:Mcgraw-hill Education,
Introductory Circuit Analysis (13th Edition)
Electrical Engineering
ISBN:9780133923605
Author:Robert L. Boylestad
Publisher:PEARSON
Delmar's Standard Textbook Of Electricity
Electrical Engineering
ISBN:9781337900348
Author:Stephen L. Herman
Publisher:Cengage Learning
Programmable Logic Controllers
Electrical Engineering
ISBN:9780073373843
Author:Frank D. Petruzella
Publisher:McGraw-Hill Education
Fundamentals of Electric Circuits
Electrical Engineering
ISBN:9780078028229
Author:Charles K Alexander, Matthew Sadiku
Publisher:McGraw-Hill Education
Electric Circuits. (11th Edition)
Electrical Engineering
ISBN:9780134746968
Author:James W. Nilsson, Susan Riedel
Publisher:PEARSON
Engineering Electromagnetics
Electrical Engineering
ISBN:9780078028151
Author:Hayt, William H. (william Hart), Jr, BUCK, John A.
Publisher:Mcgraw-hill Education,
ECE320 Lecture1-3c: Steady-State Error, System Type; Author: Rose-Hulman Online;https://www.youtube.com/watch?v=hG7dq-51AAg;License: Standard Youtube License