
Concept explainers
Videos
Hot air balloons
Rot all ballooning is a relaxing. peaceful pastime that many people enjoy. Many balloonist gatherings take place around the world, Such as the Albuquerque International Balloon Fiesta. The Albuquerque event is the largest hot air balloon festival in the world, with ovet 500 balloons participating each year.

Figure 5.61 Balloons lift off at the 2001 Albuquerque international Balloon Fiesta. (credit: David Herrera, Flickr)
As the name implies, hot air balloons use hot air to generate lift. (Hot air is less dense than cooler air, so the balloon floats as long as the hot air stays hot.) The heat is generated by a propane burner suspended below the opening of the basket. Once the balloon takes off, the pilot controls the altitude of the balloon, either by using the burner to heat the air and ascend or by using a vent near the top of the balloon to release heated air and descend. The pilot has very little control over where the balloon goes, however—balloons are at the mercy of the winds. The uncertainty over where we will end up is one of the reasons balloonists are attracted to the sport.
In this project we use tnple integrals to learn more about hot air balloons. We model the balloon in two pieces. The top of the balloon is modeled by a half sphere of radius 28 feet. The bottom of the balloon is modeled by a fnistum of a cone (think of an ice cream cone with the pointy end cut off). The radius of the large end of the fnistum is 28 feet and the radius of the small end of the fnistum is 6 feet. A graph of our balloon model and a cross-sectional diagram showing the dimensions are shown in the following figure.
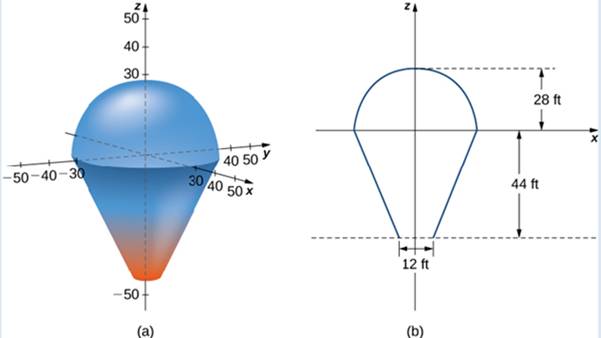
FIgure 5.62 (a)Useahalfsphetetomodeltheroppartoftheballoonandafrnsnunofaconeomodel
the bonom pan of the balloon. (b) A cross section of the balloon shong its dimensions.

Trending nowThis is a popular solution!

Chapter 5 Solutions
CALCULUS,VOLUME 3 (OER)
Additional Math Textbook Solutions
Elementary Statistics: Picturing the World (7th Edition)
University Calculus: Early Transcendentals (4th Edition)
Calculus: Early Transcendentals (2nd Edition)
A Problem Solving Approach To Mathematics For Elementary School Teachers (13th Edition)
Elementary Statistics (13th Edition)


- Question 3 over a field K. In this question, MË(K) denotes the set of n × n matrices (a) Suppose that A Є Mn(K) is an invertible matrix. Is it always true that A is equivalent to A-¹? Justify your answer. (b) Let B be given by 8 B = 0 7 7 0 -7 7 Working over the field F2 with 2 elements, compute the rank of B as an element of M2(F2). (c) Let 1 C -1 1 [4] [6] and consider C as an element of M3(Q). Determine the minimal polynomial mc(x) and hence, or otherwise, show that C can not be diagonalised. [7] (d) Show that C in (c) considered as an element of M3(R) can be diagonalised. Write down all the eigenvalues. Show your working. [8]arrow_forward16. Solve the given differential equation: y" + 4y sin (t)u(t 2π), - y(0) = 1, y'(0) = 0 Given, 1 (x² + 1)(x²+4) 1/3 -1/3 = + x²+1 x² +4 Send your answer in pen and paper don't r eputed ur self down Don't send the same previous answer that was Al generated Don't use any Al tool show ur answer in pe n and paper then takearrow_forwardR denotes the field of real numbers, Q denotes the field of rationals, and Fp denotes the field of p elements given by integers modulo p. You may refer to general results from lectures. Question 1 For each non-negative integer m, let R[x]m denote the vector space consisting of the polynomials in x with coefficients in R and of degree ≤ m. x²+2, V3 = 5. Prove that (V1, V2, V3) is a linearly independent (a) Let vi = x, V2 = list in R[x] 3. (b) Let V1, V2, V3 be as defined in (a). Find a vector v € R[×]3 such that (V1, V2, V3, V4) is a basis of R[x] 3. [8] [6] (c) Prove that the map ƒ from R[x] 2 to R[x]3 given by f(p(x)) = xp(x) — xp(0) is a linear map. [6] (d) Write down the matrix for the map ƒ defined in (c) with respect to the basis (2,2x + 1, x²) of R[x] 2 and the basis (1, x, x², x³) of R[x] 3. [5]arrow_forward
- Question 4 (a) The following matrices represent linear maps on R² with respect to an orthonormal basis: = [1/√5 2/√5 [2/√5 -1/√5] " [1/√5 2/√5] A = B = [2/√5 1/√5] 1 C = D = = = [ 1/3/5 2/35] 1/√5 2/√5 -2/√5 1/√5' For each of the matrices A, B, C, D, state whether it represents a self-adjoint linear map, an orthogonal linear map, both, or neither. (b) For the quadratic form q(x, y, z) = y² + 2xy +2yz over R, write down a linear change of variables to u, v, w such that q in these terms is in canonical form for Sylvester's Law of Inertia. [6] [4]arrow_forwardpart b pleasearrow_forwardQuestion 5 (a) Let a, b, c, d, e, ƒ Є K where K is a field. Suppose that the determinant of the matrix a cl |df equals 3 and the determinant of determinant of the matrix a+3b cl d+3e f ГЪ e [ c ] equals 2. Compute the [5] (b) Calculate the adjugate Adj (A) of the 2 × 2 matrix [1 2 A = over R. (c) Working over the field F3 with 3 elements, use row and column operations to put the matrix [6] 0123] A = 3210 into canonical form for equivalence and write down the canonical form. What is the rank of A as a matrix over F3? 4arrow_forward
- Question 2 In this question, V = Q4 and - U = {(x, y, z, w) EV | x+y2w+ z = 0}, W = {(x, y, z, w) € V | x − 2y + w − z = 0}, Z = {(x, y, z, w) € V | xyzw = 0}. (a) Determine which of U, W, Z are subspaces of V. Justify your answers. (b) Show that UW is a subspace of V and determine its dimension. (c) Is VU+W? Is V = UW? Justify your answers. [10] [7] '00'arrow_forwardGood explanation it sure experts solve itarrow_forwardBest explains it not need guidelines okkarrow_forward
- Task number: A1.1, A1.7 Topic: Celestial Navigation, Compass - Magnetic and Gyro Activ Determine compass error (magnetic and gyro) using azimuth choosing a suitable celestial body (Sun/ Stars/ Planets/ Moon). Apply variation to find the deviation of the magnetic compass. Minimum number of times that activity should be recorded: 6 (2 each phase) Sample calculation (Azimuth- Planets): On 06th May 2006 at 22h20m 10s UTC, a vessel in position 48°00'N 050°00'E observed Mars bearing 327° by compass. Find the compass error. If variation was 4.0° East, calculate the deviation. GHA Mars (06d 22h): Increment (20m 10s): 089° 55.7' 005° 02.5' v (0.9): (+) 00.3' GHA Mars: 094° 58.5' Longitude (E): (+) 050° 00.0' (plus- since longitude is easterly) LHA Mars: 144° 58.5' Declination (06d 22h): d (0.2): N 024° 18.6' (-) 00.1' Declination Mars: N 024° 18.5' P=144° 58.5' (If LHA<180°, P=LHA) A Tan Latitude/ Tan P A Tan 48° 00' Tan 144° 58.5' A = 1.584646985 N (A is named opposite to latitude, except when…arrow_forwardTask number: A1.1, A1.7 Topic: Celestial Navigation, Compass - Magnetic and Gyro Activ Determine compass error (magnetic and gyro) using azimuth choosing a suitable celestial body (Sun/ Stars/ Planets/ Moon). Apply variation to find the deviation of the magnetic compass. Minimum number of times that activity should be recorded: 6 (2 each phase) Sample calculation (Azimuth- Planets): On 06th May 2006 at 22h20m 10s UTC, a vessel in position 48°00'N 050°00'E observed Mars bearing 327° by compass. Find the compass error. If variation was 4.0° East, calculate the deviation. GHA Mars (06d 22h): Increment (20m 10s): 089° 55.7' 005° 02.5' v (0.9): (+) 00.3' GHA Mars: 094° 58.5' Longitude (E): (+) 050° 00.0' (plus- since longitude is easterly) LHA Mars: 144° 58.5' Declination (06d 22h): d (0.2): N 024° 18.6' (-) 00.1' Declination Mars: N 024° 18.5' P=144° 58.5' (If LHA<180°, P=LHA) A Tan Latitude/ Tan P A Tan 48° 00' Tan 144° 58.5' A = 1.584646985 N (A is named opposite to latitude, except when…arrow_forwardActiv Determine compass error using amplitude (Sun). Minimum number of times that activity should be performed: 3 (1 each phase) Sample calculation (Amplitude- Sun): On 07th May 2006 at Sunset, a vessel in position 10°00'N 010°00'W observed the Sun bearing 288° by compass. Find the compass error. LMT Sunset: LIT: (+) 00d 07d 18h 00h 13m 40m UTC Sunset: 07d 18h 53m (added- since longitude is westerly) Declination (07d 18h): N 016° 55.5' d (0.7): (+) 00.6' Declination Sun: N 016° 56.1' Sin Amplitude = Sin Declination/Cos Latitude = Sin 016°56.1'/ Cos 10°00' = 0.295780189 Amplitude=W17.2N (The prefix of amplitude is named easterly if body is rising, and westerly if body is setting. The suffix is named same as declination) True Bearing=287.2° Compass Bearing= 288.0° Compass Error = 0.8° Westarrow_forward
 Holt Mcdougal Larson Pre-algebra: Student Edition...AlgebraISBN:9780547587776Author:HOLT MCDOUGALPublisher:HOLT MCDOUGAL
Holt Mcdougal Larson Pre-algebra: Student Edition...AlgebraISBN:9780547587776Author:HOLT MCDOUGALPublisher:HOLT MCDOUGAL Algebra: Structure And Method, Book 1AlgebraISBN:9780395977224Author:Richard G. Brown, Mary P. Dolciani, Robert H. Sorgenfrey, William L. ColePublisher:McDougal Littell
Algebra: Structure And Method, Book 1AlgebraISBN:9780395977224Author:Richard G. Brown, Mary P. Dolciani, Robert H. Sorgenfrey, William L. ColePublisher:McDougal Littell Big Ideas Math A Bridge To Success Algebra 1: Stu...AlgebraISBN:9781680331141Author:HOUGHTON MIFFLIN HARCOURTPublisher:Houghton Mifflin Harcourt
Big Ideas Math A Bridge To Success Algebra 1: Stu...AlgebraISBN:9781680331141Author:HOUGHTON MIFFLIN HARCOURTPublisher:Houghton Mifflin Harcourt Algebra & Trigonometry with Analytic GeometryAlgebraISBN:9781133382119Author:SwokowskiPublisher:Cengage
Algebra & Trigonometry with Analytic GeometryAlgebraISBN:9781133382119Author:SwokowskiPublisher:Cengage