
Concept explainers
How fast can a racecar travel through a circular tum without skidding and hitting the wall? The answer could depend on several factors:
- The weight of the car;
- The friction between the tires and the road;
- The radius of the circle;
- The “steepness” of the turn.
In this project we investigate this question for NASCAR racecars at the Bristol Motor Speedway in Tennessee. Before considering this track in particular, we use
A car of mass m moves with constant angular speed to around a circular curve of radius R (Figure 3.20). The curve is banked at an angle
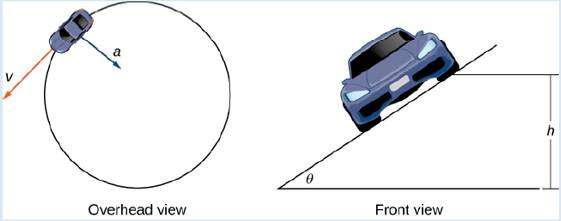
Figure 3.20 Views of a lace ear moving around a track.
As the car moves around the curve, three forces act on it: gravity, the force exerted by the road (this force is perpendicular to the ground), and the friction force (Figure 3.21). Because describing the frictional force generated by the tires and the road is complex, we use a standard approximation for the frictional force. Assume that
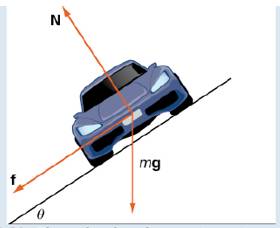
Figure 3.21 The car has three forces acting on it: gravity (denoted by mg), the friction force f, and the force exerted by the road N.
Let
The next three questions deal with developing a formula that relates the speed
6. The centripetal force is the sum of the forces in the horizontal direction, since the centripetal force points toward the center of the circular curve. Show that
Conclude that
Want to see the full answer?
Check out a sample textbook solution
Chapter 3 Solutions
CALCULUS,VOLUME 3 (OER)
Additional Math Textbook Solutions
Calculus: Early Transcendentals (2nd Edition)
Elementary Statistics (13th Edition)
A Problem Solving Approach To Mathematics For Elementary School Teachers (13th Edition)
A First Course in Probability (10th Edition)
Thinking Mathematically (6th Edition)


- R denotes the field of real numbers, Q denotes the field of rationals, and Fp denotes the field of p elements given by integers modulo p. You may refer to general results from lectures. Question 1 For each non-negative integer m, let R[x]m denote the vector space consisting of the polynomials in x with coefficients in R and of degree ≤ m. x²+2, V3 = 5. Prove that (V1, V2, V3) is a linearly independent (a) Let vi = x, V2 = list in R[x] 3. (b) Let V1, V2, V3 be as defined in (a). Find a vector v € R[×]3 such that (V1, V2, V3, V4) is a basis of R[x] 3. [8] [6] (c) Prove that the map ƒ from R[x] 2 to R[x]3 given by f(p(x)) = xp(x) — xp(0) is a linear map. [6] (d) Write down the matrix for the map ƒ defined in (c) with respect to the basis (2,2x + 1, x²) of R[x] 2 and the basis (1, x, x², x³) of R[x] 3. [5]arrow_forwardQuestion 4 (a) The following matrices represent linear maps on R² with respect to an orthonormal basis: = [1/√5 2/√5 [2/√5 -1/√5] " [1/√5 2/√5] A = B = [2/√5 1/√5] 1 C = D = = = [ 1/3/5 2/35] 1/√5 2/√5 -2/√5 1/√5' For each of the matrices A, B, C, D, state whether it represents a self-adjoint linear map, an orthogonal linear map, both, or neither. (b) For the quadratic form q(x, y, z) = y² + 2xy +2yz over R, write down a linear change of variables to u, v, w such that q in these terms is in canonical form for Sylvester's Law of Inertia. [6] [4]arrow_forwardpart b pleasearrow_forward
- Question 5 (a) Let a, b, c, d, e, ƒ Є K where K is a field. Suppose that the determinant of the matrix a cl |df equals 3 and the determinant of determinant of the matrix a+3b cl d+3e f ГЪ e [ c ] equals 2. Compute the [5] (b) Calculate the adjugate Adj (A) of the 2 × 2 matrix [1 2 A = over R. (c) Working over the field F3 with 3 elements, use row and column operations to put the matrix [6] 0123] A = 3210 into canonical form for equivalence and write down the canonical form. What is the rank of A as a matrix over F3? 4arrow_forwardQuestion 2 In this question, V = Q4 and - U = {(x, y, z, w) EV | x+y2w+ z = 0}, W = {(x, y, z, w) € V | x − 2y + w − z = 0}, Z = {(x, y, z, w) € V | xyzw = 0}. (a) Determine which of U, W, Z are subspaces of V. Justify your answers. (b) Show that UW is a subspace of V and determine its dimension. (c) Is VU+W? Is V = UW? Justify your answers. [10] [7] '00'arrow_forwardGood explanation it sure experts solve itarrow_forward
- Best explains it not need guidelines okkarrow_forwardTask number: A1.1, A1.7 Topic: Celestial Navigation, Compass - Magnetic and Gyro Activ Determine compass error (magnetic and gyro) using azimuth choosing a suitable celestial body (Sun/ Stars/ Planets/ Moon). Apply variation to find the deviation of the magnetic compass. Minimum number of times that activity should be recorded: 6 (2 each phase) Sample calculation (Azimuth- Planets): On 06th May 2006 at 22h20m 10s UTC, a vessel in position 48°00'N 050°00'E observed Mars bearing 327° by compass. Find the compass error. If variation was 4.0° East, calculate the deviation. GHA Mars (06d 22h): Increment (20m 10s): 089° 55.7' 005° 02.5' v (0.9): (+) 00.3' GHA Mars: 094° 58.5' Longitude (E): (+) 050° 00.0' (plus- since longitude is easterly) LHA Mars: 144° 58.5' Declination (06d 22h): d (0.2): N 024° 18.6' (-) 00.1' Declination Mars: N 024° 18.5' P=144° 58.5' (If LHA<180°, P=LHA) A Tan Latitude/ Tan P A Tan 48° 00' Tan 144° 58.5' A = 1.584646985 N (A is named opposite to latitude, except when…arrow_forwardTask number: A1.1, A1.7 Topic: Celestial Navigation, Compass - Magnetic and Gyro Activ Determine compass error (magnetic and gyro) using azimuth choosing a suitable celestial body (Sun/ Stars/ Planets/ Moon). Apply variation to find the deviation of the magnetic compass. Minimum number of times that activity should be recorded: 6 (2 each phase) Sample calculation (Azimuth- Planets): On 06th May 2006 at 22h20m 10s UTC, a vessel in position 48°00'N 050°00'E observed Mars bearing 327° by compass. Find the compass error. If variation was 4.0° East, calculate the deviation. GHA Mars (06d 22h): Increment (20m 10s): 089° 55.7' 005° 02.5' v (0.9): (+) 00.3' GHA Mars: 094° 58.5' Longitude (E): (+) 050° 00.0' (plus- since longitude is easterly) LHA Mars: 144° 58.5' Declination (06d 22h): d (0.2): N 024° 18.6' (-) 00.1' Declination Mars: N 024° 18.5' P=144° 58.5' (If LHA<180°, P=LHA) A Tan Latitude/ Tan P A Tan 48° 00' Tan 144° 58.5' A = 1.584646985 N (A is named opposite to latitude, except when…arrow_forward
- Activ Determine compass error using amplitude (Sun). Minimum number of times that activity should be performed: 3 (1 each phase) Sample calculation (Amplitude- Sun): On 07th May 2006 at Sunset, a vessel in position 10°00'N 010°00'W observed the Sun bearing 288° by compass. Find the compass error. LMT Sunset: LIT: (+) 00d 07d 18h 00h 13m 40m UTC Sunset: 07d 18h 53m (added- since longitude is westerly) Declination (07d 18h): N 016° 55.5' d (0.7): (+) 00.6' Declination Sun: N 016° 56.1' Sin Amplitude = Sin Declination/Cos Latitude = Sin 016°56.1'/ Cos 10°00' = 0.295780189 Amplitude=W17.2N (The prefix of amplitude is named easterly if body is rising, and westerly if body is setting. The suffix is named same as declination) True Bearing=287.2° Compass Bearing= 288.0° Compass Error = 0.8° Westarrow_forwardOnly sure experts solve it correct complete solutions okkarrow_forward4c Consider the function f(x) = 10x + 4x5 - 4x³- 1. Enter the general antiderivative of f(x)arrow_forward
 Trigonometry (MindTap Course List)TrigonometryISBN:9781305652224Author:Charles P. McKeague, Mark D. TurnerPublisher:Cengage Learning
Trigonometry (MindTap Course List)TrigonometryISBN:9781305652224Author:Charles P. McKeague, Mark D. TurnerPublisher:Cengage Learning Algebra & Trigonometry with Analytic GeometryAlgebraISBN:9781133382119Author:SwokowskiPublisher:Cengage
Algebra & Trigonometry with Analytic GeometryAlgebraISBN:9781133382119Author:SwokowskiPublisher:Cengage Trigonometry (MindTap Course List)TrigonometryISBN:9781337278461Author:Ron LarsonPublisher:Cengage Learning
Trigonometry (MindTap Course List)TrigonometryISBN:9781337278461Author:Ron LarsonPublisher:Cengage Learning