
Videos
Interpretation:
We are asked to plot the potentials of the non-linear differential equations of three different kinds of bifurcations.
a) Saddle node bifurcation
b) Transcritical bifurcation
c) Subcritical pitchfork bifurcation.
Concept Introduction:
Bifurcations and Bifurcation points - The qualitative structure of the flow can change as parameters are varied. In particular, fixed points can be created or destroyed, or their stability canchange. These qualitative changes in the dynamics are calledbifurcations, and the parameter values at which they occur are called bifurcation points.
Saddle node bifurcation is a mechanism by which the fixed points move toward each other and eventually annihilate.
Pitchfork bifurcation is the bifurcation mainly seen in symmetrical physical problems. Stable or unstable fixed points appear and disappear in pairs in such cases.
Problems in which pair of stable symmetric fixed points emerge are called subcritical pitchfork bifurcation.
Problems in which pair of unstable symmetric fixed points emerge are called supercritical pitchfork bifurcation.
In some physical systems, there exists a stable point irrespective of parameter values. (Either r < 0, r = 0 or r > 0) such cases are called transcritical bifurcation.
Answer to Problem 16E
Solution:
Plots for potentials of equations a, b and c with their different r values are plotted below.
Explanation of Solution
(a) We have,
To find the potential
By integrating the above equation,
Let’s take,
To find the critical points, substitute
These are the fixed point of the potential function.
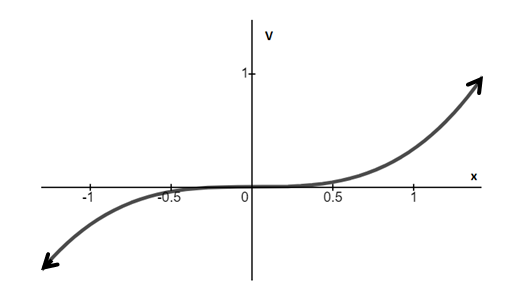
If r > 0, there are two fixed points, one stable and another unstable as the value of r decreases further, both points approach towards each other. At r = 0, both fixed points collide and annihilate after r <0 thus r = 0 issaddle-node bifurcationpoint.
Potential V(x) for different values of r is plotted below.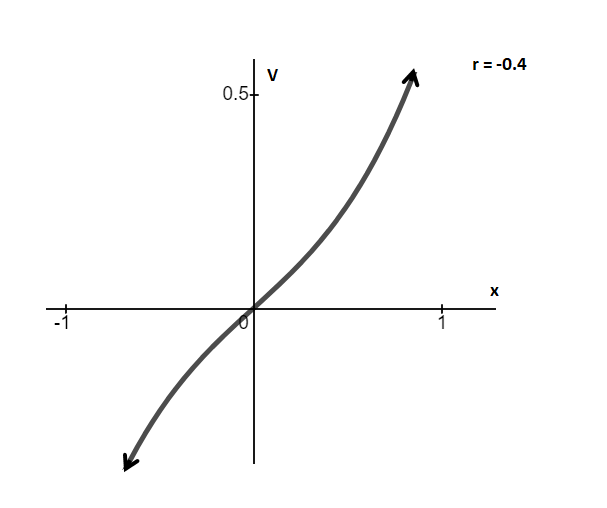
V vs. x for r = 0
V vs. x for r > 0
(b) The first-order system equation is
To calculate the potential V(x) for the system let us use,
Integrating,
To find the critical points, substitute 0 for
As we can see, out of two fixed points, one point always lies on the origin and as parameter changes its value, fixed points change their stability.
Therefore, at r = 0, transcritical bifurcation occurs.
Potentials for different r valued are plotted below.
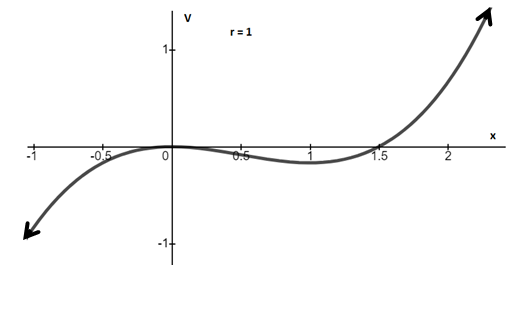
Graph between V and x for r < 0 (r = -1)
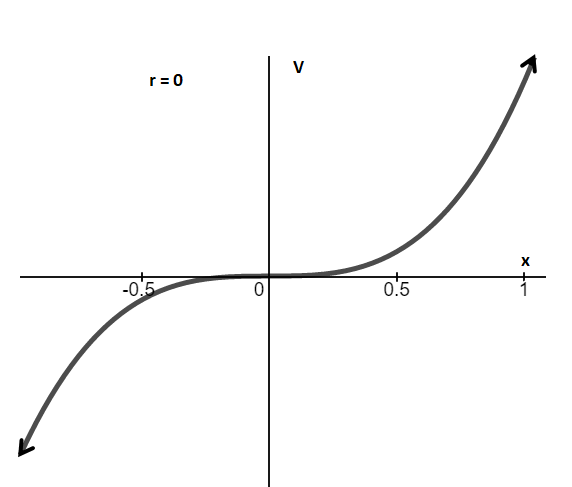
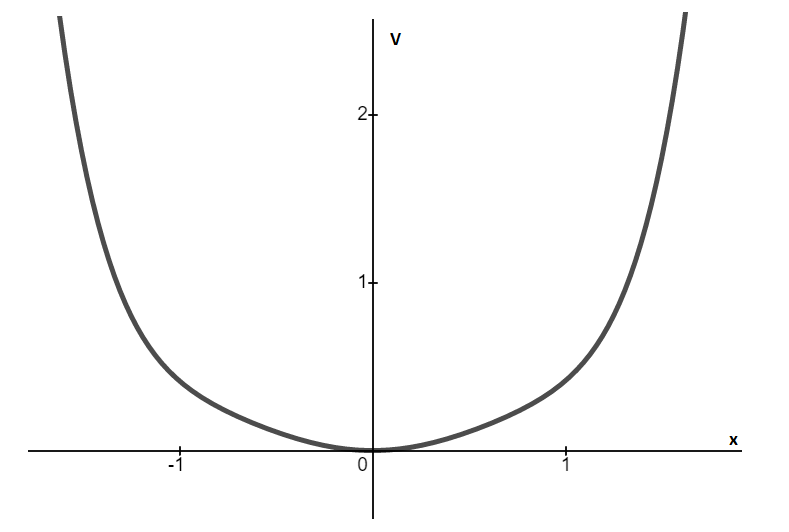
Graph between V and x for r = 0
The graph between V and x for r>0
(c)
We have the equation of the system,
To calculate the potential
Integrating,
To find the critical points, substitute
And
Others fixed points are:
Obtain the second differentiation of the potential function,
Local minima occur when,
Check out at differential points for the local minima as,
Similarly,
Therefore, three critical points wells occur at
For simplicity, take
Substitute
Further, solve for r,
Here,
Hence,
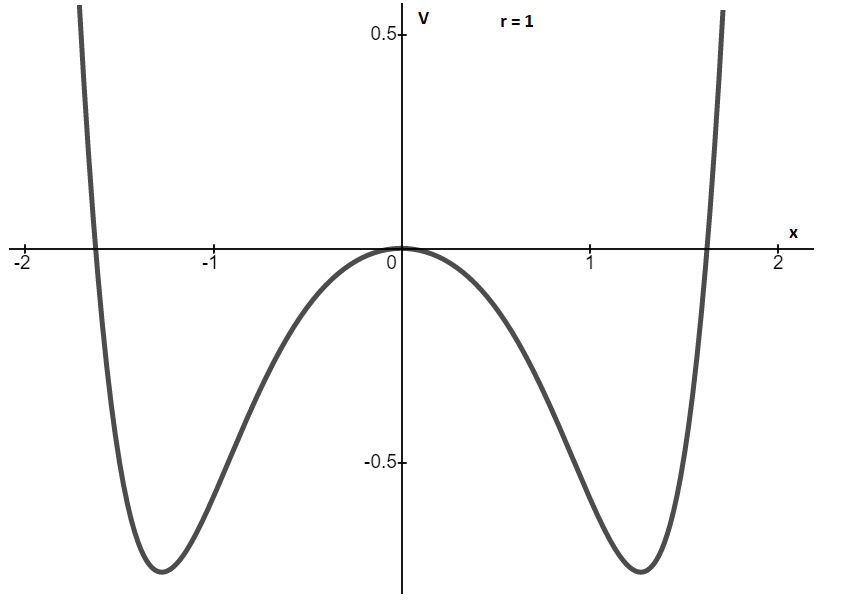
Graphs of potential vs. position x are plotted below.
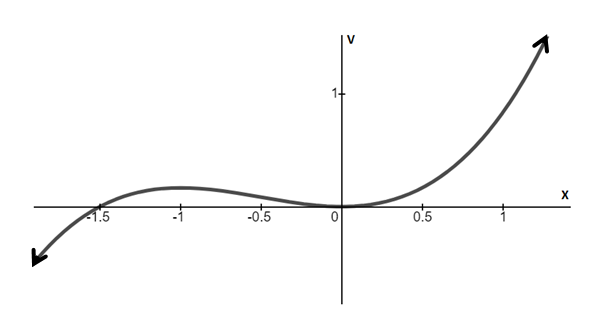
Graph between V and x for r<0
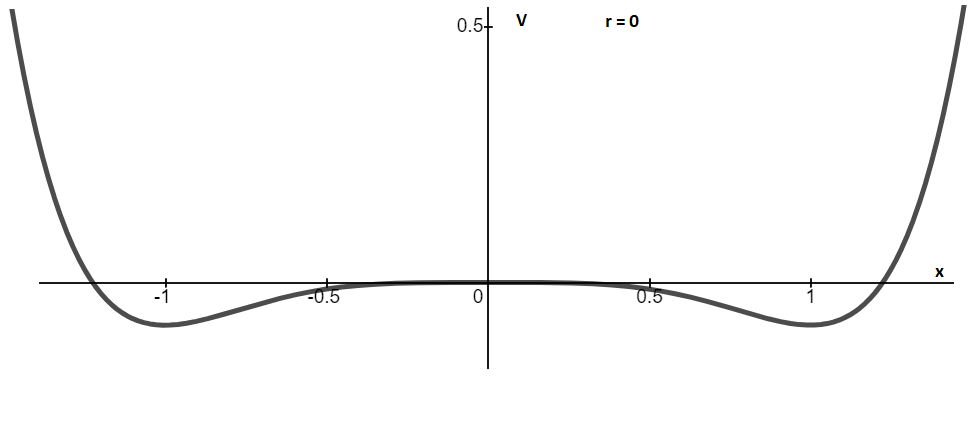
Graph between V and x for r=0
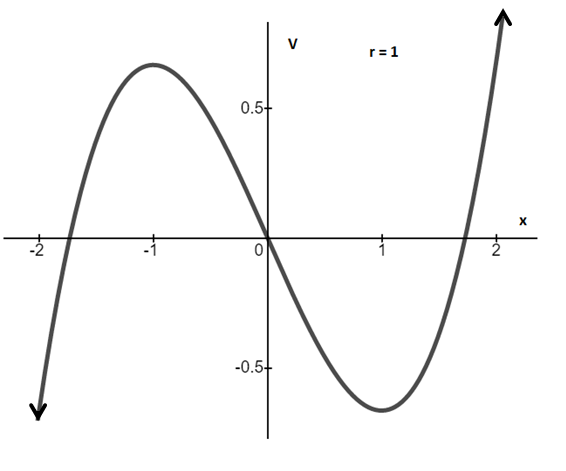
Graph between V and x for r>0
Want to see more full solutions like this?
Chapter 3 Solutions
Nonlinear Dynamics and Chaos


- Convert 101101₂ to base 10arrow_forwardDefinition: A topology on a set X is a collection T of subsets of X having the following properties. (1) Both the empty set and X itself are elements of T. (2) The union of an arbitrary collection of elements of T is an element of T. (3) The intersection of a finite number of elements of T is an element of T. A set X with a specified topology T is called a topological space. The subsets of X that are members of are called the open sets of the topological space.arrow_forward2) Prove that for all integers n > 1. dn 1 (2n)! 1 = dxn 1 - Ꮖ 4 n! (1-x)+/arrow_forward
- Definition: A topology on a set X is a collection T of subsets of X having the following properties. (1) Both the empty set and X itself are elements of T. (2) The union of an arbitrary collection of elements of T is an element of T. (3) The intersection of a finite number of elements of T is an element of T. A set X with a specified topology T is called a topological space. The subsets of X that are members of are called the open sets of the topological space.arrow_forwardDefinition: A topology on a set X is a collection T of subsets of X having the following properties. (1) Both the empty set and X itself are elements of T. (2) The union of an arbitrary collection of elements of T is an element of T. (3) The intersection of a finite number of elements of T is an element of T. A set X with a specified topology T is called a topological space. The subsets of X that are members of are called the open sets of the topological space.arrow_forward3) Let a1, a2, and a3 be arbitrary real numbers, and define an = 3an 13an-2 + An−3 for all integers n ≥ 4. Prove that an = 1 - - - - - 1 - - (n − 1)(n − 2)a3 − (n − 1)(n − 3)a2 + = (n − 2)(n − 3)aı for all integers n > 1.arrow_forward
- Definition: A topology on a set X is a collection T of subsets of X having the following properties. (1) Both the empty set and X itself are elements of T. (2) The union of an arbitrary collection of elements of T is an element of T. (3) The intersection of a finite number of elements of T is an element of T. A set X with a specified topology T is called a topological space. The subsets of X that are members of are called the open sets of the topological space.arrow_forwardDefinition: A topology on a set X is a collection T of subsets of X having the following properties. (1) Both the empty set and X itself are elements of T. (2) The union of an arbitrary collection of elements of T is an element of T. (3) The intersection of a finite number of elements of T is an element of T. A set X with a specified topology T is called a topological space. The subsets of X that are members of are called the open sets of the topological space.arrow_forwardDefinition: A topology on a set X is a collection T of subsets of X having the following properties. (1) Both the empty set and X itself are elements of T. (2) The union of an arbitrary collection of elements of T is an element of T. (3) The intersection of a finite number of elements of T is an element of T. A set X with a specified topology T is called a topological space. The subsets of X that are members of are called the open sets of the topological space.arrow_forward
 Advanced Engineering MathematicsAdvanced MathISBN:9780470458365Author:Erwin KreyszigPublisher:Wiley, John & Sons, Incorporated
Advanced Engineering MathematicsAdvanced MathISBN:9780470458365Author:Erwin KreyszigPublisher:Wiley, John & Sons, Incorporated Numerical Methods for EngineersAdvanced MathISBN:9780073397924Author:Steven C. Chapra Dr., Raymond P. CanalePublisher:McGraw-Hill Education
Numerical Methods for EngineersAdvanced MathISBN:9780073397924Author:Steven C. Chapra Dr., Raymond P. CanalePublisher:McGraw-Hill Education Introductory Mathematics for Engineering Applicat...Advanced MathISBN:9781118141809Author:Nathan KlingbeilPublisher:WILEY
Introductory Mathematics for Engineering Applicat...Advanced MathISBN:9781118141809Author:Nathan KlingbeilPublisher:WILEY Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,
Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,
