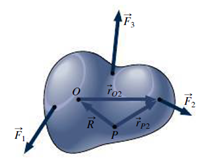
Prove the statement in Section 12.1 that the choice of pivot point doesn't matter when applying conditions for static equilibrium. Figure 12.28 shows an object on which the net force is assumed to be zero. The net torque about the point O is also zero. Show that the net torque about any other point P is also zero. To do so, write the net torque about P as τ → P = ∑ r → P i × F → i where the vectors r → P go from P to the force-application points, and the index i labels the different forces. In Fig. 12.28, note that r → P i = r → O i × R → where R → is a vector from P to O . Use this result in your expression for τ → P and apply the distributive law to get two separate sums. Use the assumptions that F → n e t = 0 → and τ → O = 0 → to argue that both terms are zero. This completes the proof. FIGURE 12.28 Problem 51
Prove the statement in Section 12.1 that the choice of pivot point doesn't matter when applying conditions for static equilibrium. Figure 12.28 shows an object on which the net force is assumed to be zero. The net torque about the point O is also zero. Show that the net torque about any other point P is also zero. To do so, write the net torque about P as τ → P = ∑ r → P i × F → i where the vectors r → P go from P to the force-application points, and the index i labels the different forces. In Fig. 12.28, note that r → P i = r → O i × R → where R → is a vector from P to O . Use this result in your expression for τ → P and apply the distributive law to get two separate sums. Use the assumptions that F → n e t = 0 → and τ → O = 0 → to argue that both terms are zero. This completes the proof. FIGURE 12.28 Problem 51
Prove the statement in Section 12.1 that the choice of pivot point doesn't matter when applying conditions for static equilibrium. Figure 12.28 shows an object on which the net force is assumed to be zero. The net torque about the point O is also zero. Show that the net torque about any other point P is also zero. To do so, write the net torque about P as
τ
→
P
=
∑
r
→
P
i
×
F
→
i
where the vectors
r
→
P
go from P to the force-application points, and the index i labels the different forces. In Fig. 12.28, note that
r
→
P
i
=
r
→
O
i
×
R
→
where
R
→
is a vector from P to O. Use this result in your expression for
τ
→
P
and apply the distributive law to get two separate sums. Use the assumptions that
F
→
n
e
t
=
0
→
and
τ
→
O
=
0
→
to argue that both terms are zero. This completes the proof.
!
Required information
The radius of the Moon is 1.737 Mm and the distance between Earth and the Moon is 384.5 Mm.
The intensity of the moonlight incident on her eye is 0.0220 W/m². What is the intensity incident on her retina if the
diameter of her pupil is 6.54 mm and the diameter of her eye is 1.94 cm?
W/m²
Required information
An object is placed 20.0 cm from a converging lens with focal length 15.0 cm (see the figure, not drawn to scale). A
concave mirror with focal length 10.0 cm is located 76.5 cm to the right of the lens. Light goes through the lens, reflects
from the mirror, and passes through the lens again, forming a final image.
Converging
lens
Object
Concave
mirror
15.0 cm
-20.0 cm-
10.0 cm
d cm
d = 76.5.
What is the location of the final image?
cm to the left of the lens
!
Required information
A man requires reading glasses with +2.15-D refractive power to read a book held 40.0 cm away with a relaxed eye.
Assume the glasses are 1.90 cm from his eyes.
His uncorrected near point is 1.00 m. If one of the lenses is the one for distance vision, what should the refractive power of the other
lens (for close-up vision) in his bifocals be to give him clear vision from 25.0 cm to infinity?
2.98 D
Applications and Investigations in Earth Science (9th Edition)
Knowledge Booster
Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, physics and related others by exploring similar questions and additional content below.



 Classical Dynamics of Particles and SystemsPhysicsISBN:9780534408961Author:Stephen T. Thornton, Jerry B. MarionPublisher:Cengage Learning
Classical Dynamics of Particles and SystemsPhysicsISBN:9780534408961Author:Stephen T. Thornton, Jerry B. MarionPublisher:Cengage Learning University Physics Volume 1PhysicsISBN:9781938168277Author:William Moebs, Samuel J. Ling, Jeff SannyPublisher:OpenStax - Rice University
University Physics Volume 1PhysicsISBN:9781938168277Author:William Moebs, Samuel J. Ling, Jeff SannyPublisher:OpenStax - Rice University Glencoe Physics: Principles and Problems, Student...PhysicsISBN:9780078807213Author:Paul W. ZitzewitzPublisher:Glencoe/McGraw-Hill
Glencoe Physics: Principles and Problems, Student...PhysicsISBN:9780078807213Author:Paul W. ZitzewitzPublisher:Glencoe/McGraw-Hill Principles of Physics: A Calculus-Based TextPhysicsISBN:9781133104261Author:Raymond A. Serway, John W. JewettPublisher:Cengage Learning
Principles of Physics: A Calculus-Based TextPhysicsISBN:9781133104261Author:Raymond A. Serway, John W. JewettPublisher:Cengage Learning Physics for Scientists and Engineers: Foundations...PhysicsISBN:9781133939146Author:Katz, Debora M.Publisher:Cengage Learning
Physics for Scientists and Engineers: Foundations...PhysicsISBN:9781133939146Author:Katz, Debora M.Publisher:Cengage Learning Physics for Scientists and Engineers, Technology ...PhysicsISBN:9781305116399Author:Raymond A. Serway, John W. JewettPublisher:Cengage Learning
Physics for Scientists and Engineers, Technology ...PhysicsISBN:9781305116399Author:Raymond A. Serway, John W. JewettPublisher:Cengage Learning