Videos
(a)
To calculate: The right end behavior model.
(a)
Answer to Problem 43E
The right behavior model shows that as x approaches
Explanation of Solution
Given Information: The function is
Calculation:
The graph of the function looks like this,
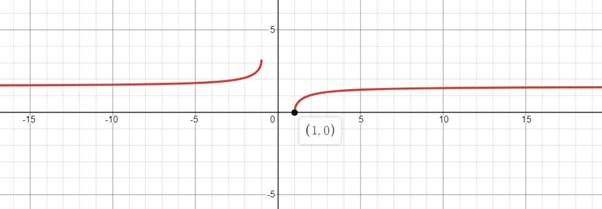
The right-hand behaviour model is,
The right behavior model shows that as x approaches
(b)
To calculate: The left end behavior model.
(b)
Answer to Problem 43E
The right behavior model shows that as x approaches
Explanation of Solution
Given Information: The function is
Calculation:
The graph of the function looks like this,
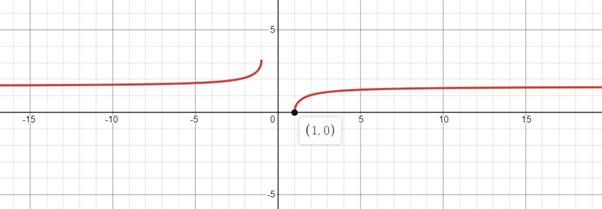
The left-hand behaviour model is,
The right behavior model shows that as x approaches
(c)
To calculate: To find if there are any horizontal tangents.
(c)
Answer to Problem 43E
The function has no horizontal tangent.
Explanation of Solution
Given Information: The function is
Calculation:
The graph of the function looks like this,
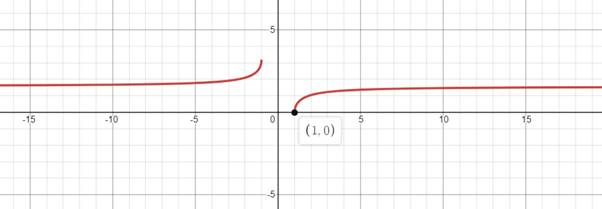
The horizontal tangent is obtained by equating derivative of the function to 0.
The derivative of the function is,
Equate the derivative to 0,
The above condition is not possible for any value of x, hence the function has no horizontal tangent.
The function has no horizontal tangent.
Chapter 4 Solutions
Calculus 2012 Student Edition (by Finney/Demana/Waits/Kennedy)
Additional Math Textbook Solutions
University Calculus: Early Transcendentals (4th Edition)
A Problem Solving Approach To Mathematics For Elementary School Teachers (13th Edition)
Calculus: Early Transcendentals (2nd Edition)
Basic Business Statistics, Student Value Edition
Elementary Statistics
Algebra and Trigonometry (6th Edition)


- 23. Network Analysis The figure shows the flow of traffic (in vehicles per hour) through a network of streets. 200 100- -100 200 (a) Solve this system for i = 1, 2, 3, 4. (b) Find the traffic flow when x = 0. (c) Find the traffic flow when x = 100. (d) Find the traffic flow when x, = 2x₂.arrow_forward2\int_{-3/2}^{3/2} \sqrt{4u^2+2} duarrow_forward2. Consider the following: Prove that x, x2, and 1/x are the solutions to the homogeneous equation corresponding to x³y"" + x²y" + 2xy' + 2y = 2x4. b. use variation of parameters to find a particular solution and complete the general solution to the differential equation. I am interested in process. You may use a computer for integration, finding determinants and doing Kramer's.arrow_forward
- 3. A spring is stretched 6 in. by a mass that weighs 8 lb. The mass is attached to a dashpot mechanism that has a damping constant of 0.25 lb-sec./ft. and is acted on by an external force of 4 cos 2t lb. a. Set-up the differential equation and initial value problem for the system. b. Write the function in phase-amplitude form. C. Determine the transient solution to the system. Show your work. d. Determine the steady state of this system. Show your work. e. Is the system underdamped, overdamped or critically damped? Explain what this means for the system.arrow_forward4. Suppose that you have a circuit with a resistance of 20, inductance of 14 H and a capacitance of 11 F. An EMF with equation of E(t) = 6 cos 4t supplies a continuous charge 60 to the circuit. Suppose that the q(0)= 8 V and the q'(0)=7. Use this information to answer the following questions a. Find the function that models the charge of this circuit. b. Is the circuit underdamped, overdamped or critically damped?arrow_forward1. Solve the initial value problem: y" -11y' + 30y = x³e6x y(0) 11, y'(0) = 36 =arrow_forward
- What is the particular solution to the differential equation y′′ + y = 1/cos t ?arrow_forwardWhich of the following is the general solution to y′′ + 4y = e^2t + 12 sin(2t) ?A. y(t) = c1 cos(2t) + c2 sin(2t) + 1/8 e^2t − 3t cos(2t)B. y(t) = c1e^2t + c2e^−2t + 1/4 te^2t − 3t cos(2t)C. y(t) = c1 + c2e^−4t + 1/12 te^2t − 3t cos(2t)D. y(t) = c1 cos(2t) + c2 sin(2t) + 1/8 e^2t + 3 sin(2t)E. None of the above. Please include all steps! Thank you!arrow_forwardShow that i cote +1 = cosec 20 tan 20+1 = sec² O २ cos² + sin 20 = 1 using pythagon's theoremarrow_forward
- Find the general solution to the differential equationarrow_forwardcharity savings Budget for May travel food Peter earned $700 during May. The graph shows how the money was used. What fraction was clothes? O Search Submit clothes leisurearrow_forwardExercise 11.3 A slope field is given for the equation y' = 4y+4. (a) Sketch the particular solution that corresponds to y(0) = −2 (b) Find the constant solution (c) For what initial conditions y(0) is the solution increasing? (d) For what initial conditions y(0) is the solution decreasing? (e) Verify these results using only the differential equation y' = 4y+4.arrow_forward
 Calculus: Early TranscendentalsCalculusISBN:9781285741550Author:James StewartPublisher:Cengage Learning
Calculus: Early TranscendentalsCalculusISBN:9781285741550Author:James StewartPublisher:Cengage Learning Thomas' Calculus (14th Edition)CalculusISBN:9780134438986Author:Joel R. Hass, Christopher E. Heil, Maurice D. WeirPublisher:PEARSON
Thomas' Calculus (14th Edition)CalculusISBN:9780134438986Author:Joel R. Hass, Christopher E. Heil, Maurice D. WeirPublisher:PEARSON Calculus: Early Transcendentals (3rd Edition)CalculusISBN:9780134763644Author:William L. Briggs, Lyle Cochran, Bernard Gillett, Eric SchulzPublisher:PEARSON
Calculus: Early Transcendentals (3rd Edition)CalculusISBN:9780134763644Author:William L. Briggs, Lyle Cochran, Bernard Gillett, Eric SchulzPublisher:PEARSON Calculus: Early TranscendentalsCalculusISBN:9781319050740Author:Jon Rogawski, Colin Adams, Robert FranzosaPublisher:W. H. Freeman
Calculus: Early TranscendentalsCalculusISBN:9781319050740Author:Jon Rogawski, Colin Adams, Robert FranzosaPublisher:W. H. Freeman
 Calculus: Early Transcendental FunctionsCalculusISBN:9781337552516Author:Ron Larson, Bruce H. EdwardsPublisher:Cengage Learning
Calculus: Early Transcendental FunctionsCalculusISBN:9781337552516Author:Ron Larson, Bruce H. EdwardsPublisher:Cengage Learning