
Concept explainers
Videos
Find three (or other number as assigned) of the following common devices. Sketch careful kinematic diagrams and find their total degrees of freedom.
- An automobile hood hinge
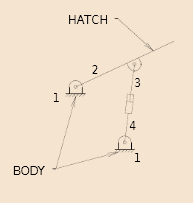
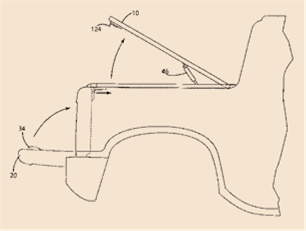
mechanism - An automobile hatchback lift mechanism
- An electric can opener
- A folding ironing board
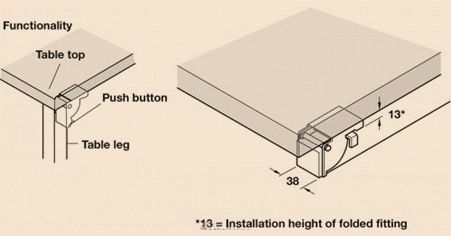
- A folding card able
- A folding beach chair
- A baby swing
- A folding baby walker
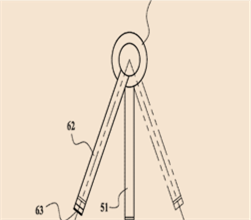
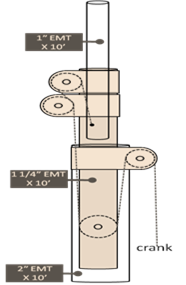
- A fancy corkscrew as shown in Figure P2-9
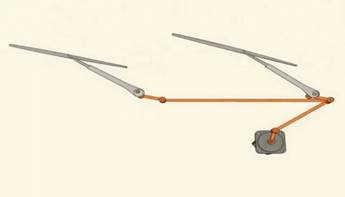
- A windshield wiper mechanism
- A dump truck dump mechanism
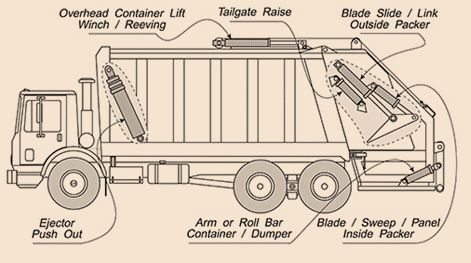
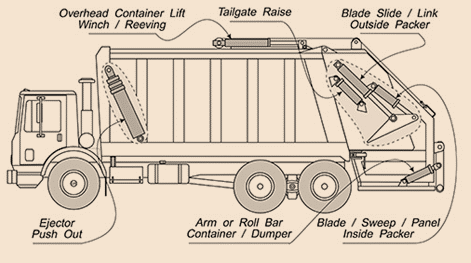
- A trash truck dumpster mechanism
- A pickup truck tailgate mechanism
- An automobile jack
- A collapsible auto radio antenna
a.
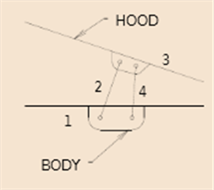
To find:Kinematic diagrams and total DOF in an automobile hood hinge mechanism.
Explanation of Solution
Given information:
The initial conditions that are given are that of an automobile hood hinge mechanism
Calculation:
Here KutzbatchEquation is used to compute mobility (DOF) of the shown system below. An automobile mechanism systemcondition is as shown.
b.
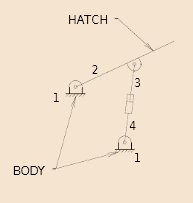
To find:Kinematic diagrams and total DOF inan automobile hatchback lift mechanism.
Explanation of Solution
Given information:
The initial conditions that are given are that of An automobile hatchback lift mechanism.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the models below. Here mainly considering the given mechanism of an automobile hatchback lift mechanism which having the
c.
To find:Kinematic diagrams and total DOF in the electric can opener.
Explanation of Solution
Given information:
The initial conditions that are given are that of electric opener has 2 DOF.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanismbelow. Here mainly considering the given mechanism of an electric opener has 2 DOF
d.
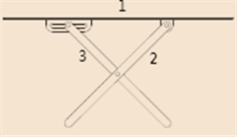
To find:Kinematic diagrams and total DOF in a folding ironing board.
Explanation of Solution
Given information:
The initial conditions that are given are that of a folding ironing board
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below.Here mainly considering the given mechanism A folding ironing board with One leg joins pivot joint on board and the other is slider joint.
e.
To find:Kinematic diagrams and total DOF in a folding card table.
Explanation of Solution
Given information:
The initial conditions that are given are that ofa folding card table.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A folding card table having 7 DOF for considering 1 for individual leg, 2 for x-ylocation and one for angular orientation.
f.
To find:Kinematic diagrams and total DOF in a folding beach chair.
Explanation of Solution
Given information:
The initial conditions that are given are that of a folding beach chair.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A folding beach chair with ternary links having analysis below is Subtract 1 DOF forced stop.

g.
To find:Kinematic diagrams and total DOF in a baby swing.
Explanation of Solution
Given information:
The initial conditions that are given are that ofa baby swing.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A baby swing has 4 DOF,for swing 1 angular orientation w.r.t. frame, and 3 for location and orientation of the frame w.r.t. a 2-D frame.
h.
To find:Kinematic diagrams and total DOF in a folding baby walker.
Explanation of Solution
Given information:
The initial conditions that are given are that ofA folding baby walker
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A folding baby walker having 4 DOF with considering of 1 degree with unfolded, and 3 for the walkerlocation and orientation w.r.t.a 2-D frame.
i.
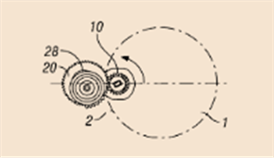
To find:Kinematic diagrams and total DOF in a fancy corkscrew.
Explanation of Solution
Given information:
The initial conditions that are given are that ofa fancy corkscrew.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A fancy corkscrew having 2 DOF for screw rotated and arms rotate to translate w.r.t. screw.
j.
To find:Kinematic diagrams and total DOF in a windshield wiper mechanism.
Explanation of Solution
Given information:
The initial conditions that are given are that of A windshield wiper mechanism.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below.A windshield wiper mechanism has 1 DOF with considering of the wiper blades position w.r.t. a single input.
k.
To find:Kinematic diagrams and total DOF in a dump truck mechanism.
Explanation of Solution
Given information:
The initial conditions that are given are that of. A dump-truck dump mechanism
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below.A dump-truck dump mechanism having 1 DOF for a angle of dump body for length of the hydraulic cylinder links w.r.t. the body truck.
l.
To find:Kinematic diagrams and total DOF in a trash truck mechanism.
Explanation of Solution
Given information:
The initial conditions that are given are that ofA trash truck dumpster mechanism
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A trash truck dumpster mechanism having 2 DOF for generally a rotation and a translation.
m.
To find:Kinematic diagrams and to find their total DOF in a trash truck tailgate mechanism.
Explanation of Solution
Given information:
The initial conditions that are given are that ofa pickup tailgate mechanism.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. A pickup tailgate mechanism having a 1 DOF.
n.
To find:Kinematic diagrams and total DOF in an automobile jack.
Explanation of Solution
Given information:
The initial conditions that are given are that ofAn automobile jack mechanism.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. An automobile jack having 1 DOF for height jack and the other for the positionand orientation of the jack w.r.t. a 2-D frame.
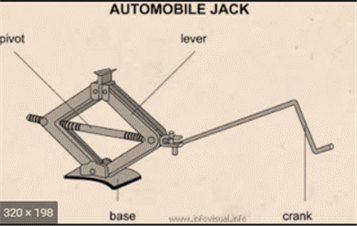
, total4 DOF
o.
To find:Kinematic diagrams and total DOF in a collapsible auto radio antenna.
Explanation of Solution
Given information:
The initial conditions that are given are that ofa collapsible auto radio antenna mechanism.
Calculation:
Here Kutzbatch Equation is used to compute mobility (DOF) the given mechanism below. Amany DOF with considering section for a collapsible auto radio antenna, its less one.
Want to see more full solutions like this?
Chapter 2 Solutions
DESIGN OF MACHINERY (LL) >CUSTOM<


- This is an exam review question. The answer is Pmin = 622.9 lb but whyarrow_forwardPlease do not use any AI tools to solve this question. I need a fully manual, step-by-step solution with clear explanations, as if it were done by a human tutor. No AI-generated responses, please.arrow_forwardPlease do not use any AI tools to solve this question. I need a fully manual, step-by-step solution with clear explanations, as if it were done by a human tutor. No AI-generated responses, please.arrow_forward
- Please do not use any AI tools to solve this question. I need a fully manual, step-by-step solution with clear explanations, as if it were done by a human tutor. No AI-generated responses, please.arrow_forwardThis is an old practice exam. Fce = 110lb and FBCD = 62 lb but whyarrow_forwardQuiz/An eccentrically loaded bracket is welded to the support as shown in Figure below. The load is static. The weld size for weld w1 is h1 = 4mm, for w2 h2 = 6mm, and for w3 is h3 =6.5 mm. Determine the safety factor (S.f) for the welds. F=29 kN. Use an AWS Electrode type (E100xx). 163 mm S 133 mm 140 mm Please solve the question above I solved the question but I'm sure the answer is wrong the link : https://drive.google.com/file/d/1w5UD2EPDiaKSx3W33aj Rv0olChuXtrQx/view?usp=sharingarrow_forward
- Q2: (15 Marks) A water-LiBr vapor absorption system incorporates a heat exchanger as shown in the figure. The temperatures of the evaporator, the absorber, the condenser, and the generator are 10°C, 25°C, 40°C, and 100°C respectively. The strong liquid leaving the pump is heated to 50°C in the heat exchanger. The refrigerant flow rate through the condenser is 0.12 kg/s. Calculate (i) the heat rejected in the absorber, and (ii) the COP of the cycle. Yo 8 XE-V lo 9 Pc 7 condenser 5 Qgen PG 100 Qabs Pe evaporator PRV 6 PA 10 3 generator heat exchanger 2 pump 185 absorberarrow_forwardQ5:(? Design the duct system of the figure below by using the balanced pressure method. The velocity in the duct attached to the AHU must not exceed 5m/s. The pressure loss for each diffuser is equal to 10Pa. 100CFM 100CFM 100CFM ☑ ☑ 40m AHU -16m- 8m- -12m- 57m 250CFM 40m -14m- 26m 36m ☑ 250CFMarrow_forwardA mass of ideal gas in a closed piston-cylinder system expands from 427 °C and 16 bar following the process law, pv1.36 = Constant (p times v to the power of 1.36 equals to a constant). For the gas, initial : final pressure ratio is 4:1 and the initial gas volume is 0.14 m³. The specific heat of the gas at constant pressure, Cp = 0.987 kJ/kg-K and the specific gas constant, R = 0.267 kJ/kg.K. Determine the change in total internal energy in the gas during the expansion. Enter your numerical answer in the answer box below in KILO JOULES (not in Joules) but do not enter the units. (There is no expected number of decimal points or significant figures).arrow_forward
- my ID# 016948724. Please solve this problem step by steparrow_forwardMy ID# 016948724 please find the forces for Fx=0: fy=0: fz=0: please help me to solve this problem step by steparrow_forwardMy ID# 016948724 please solve the proble step by step find the forces fx=o: fy=0; fz=0; and find shear moment and the bending moment diagran please draw the diagram for the shear and bending momentarrow_forward
 Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Principles of Heat Transfer (Activate Learning wi...Mechanical EngineeringISBN:9781305387102Author:Kreith, Frank; Manglik, Raj M.Publisher:Cengage Learning
Principles of Heat Transfer (Activate Learning wi...Mechanical EngineeringISBN:9781305387102Author:Kreith, Frank; Manglik, Raj M.Publisher:Cengage Learning International Edition---engineering Mechanics: St...Mechanical EngineeringISBN:9781305501607Author:Andrew Pytel And Jaan KiusalaasPublisher:CENGAGE L
International Edition---engineering Mechanics: St...Mechanical EngineeringISBN:9781305501607Author:Andrew Pytel And Jaan KiusalaasPublisher:CENGAGE L Refrigeration and Air Conditioning Technology (Mi...Mechanical EngineeringISBN:9781305578296Author:John Tomczyk, Eugene Silberstein, Bill Whitman, Bill JohnsonPublisher:Cengage Learning
Refrigeration and Air Conditioning Technology (Mi...Mechanical EngineeringISBN:9781305578296Author:John Tomczyk, Eugene Silberstein, Bill Whitman, Bill JohnsonPublisher:Cengage Learning Precision Machining Technology (MindTap Course Li...Mechanical EngineeringISBN:9781285444543Author:Peter J. Hoffman, Eric S. Hopewell, Brian JanesPublisher:Cengage Learning
Precision Machining Technology (MindTap Course Li...Mechanical EngineeringISBN:9781285444543Author:Peter J. Hoffman, Eric S. Hopewell, Brian JanesPublisher:Cengage Learning Electrical Transformers and Rotating MachinesMechanical EngineeringISBN:9781305494817Author:Stephen L. HermanPublisher:Cengage Learning
Electrical Transformers and Rotating MachinesMechanical EngineeringISBN:9781305494817Author:Stephen L. HermanPublisher:Cengage Learning