
Concept explainers
Videos
(a)
The root locus of the given characteristic equation
Explanation of Solution
Given:
Concept Used:
Root Locus technique.
Calculation:
The characteristic equation is defined as
On solving we get,
Where,
Therefore, Poles are
And zero is
Total number of branches is
Centroid is calculated as:
Where poles are
Angle of asymptotes is calculated as:
Angle of asymptotes
Where P = no. of poles
Z = No. of zeros
On replacing the values
The
Breakaway point is calculated as:
To calculate breakaway point, replace
So,
Breakaway point is
Calculating the value of
For Stability
Auxiliary equation is defined as:
Replace the value of
This is the point on the imaginary axis
Root locus plot of the characteristic equation is
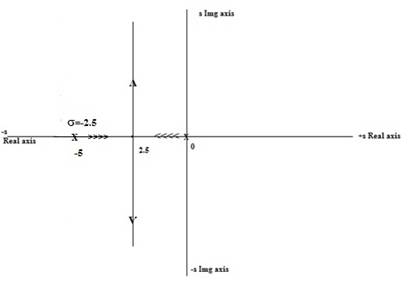
Fig.1
Conclusion:
Root has been plotted for the given characteristic equation is shown in Fig.1.
(b)
The root locus of the given characteristic equation
Explanation of Solution
Given:
Concept Used:
Root Locus technique.
Calculation:
The characteristic equation is defined as
Where,
Therefore, Poles are
And zero is
Total number of branches is
Centroid is calculated as:
Where poles are
Angle of asymptotes is calculated as:
Angle of asymptotes
Where P = no. of poles
Z = No. of zeros
On replacing the values
The
Breakaway point is calculated as:
To calculate breakaway point, replace
So,
Calculating the value of
For Stability
Auxiliary equation is defined as:
Replace the value of
For
For
This is the point on the imaginary axis
Angle of departure is calculated where there are either poles or zero is imaginary.
Root locus plot of the characteristic equation is
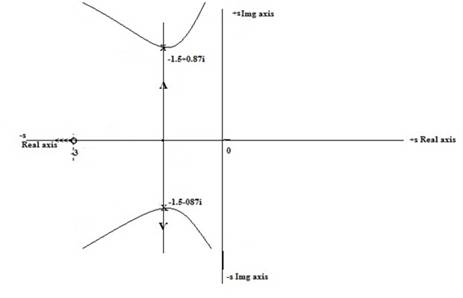
Fig.2
Conclusion:
Root has been plotted for the given characteristic equation is shown in Fig.2.
(c)
The root locus of the given characteristic equation
Explanation of Solution
Given:
Concept Used:
Root Locus technique.
Calculation:
The characteristic equation is defined as
Where,
Therefore, Poles are
And zero is
Total number of branches is
Centroid is calculated as:
Where poles are
Angle of asymptotes is calculated as:
Angle of asymptotes
Where P = no. of poles
Z = No. of zeros
On replacing the values
The
Breakaway point is calculated as:
To calculate breakaway point, replace
So,
Breakaway point is
Calculating the value of
For Stability
Auxiliary equation is defined as:
Replace the value of
This is the point on the imaginary axis
Root locus plot of the characteristic equation is
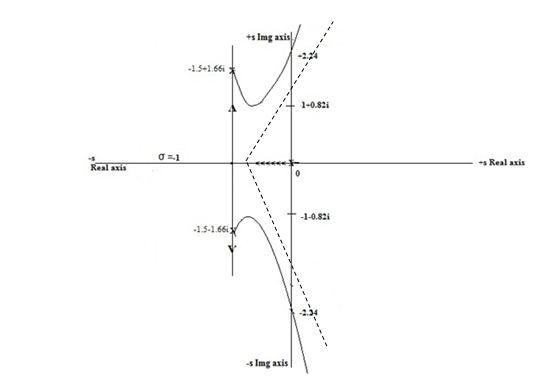
Fig.3
Conclusion:
Root has been plotted for the given characteristic equation is shown in Fig.3.
(d)
The root locus of the given characteristic equation
Explanation of Solution
Given:
Concept Used:
Root Locus technique.
Calculation:
The characteristic equation is defined as
On solving we get,
Therefore, Poles are
And zero is
Total number of branches is
Centroid is calculated as:
Where poles are
Angle of asymptotes is calculated as:
Angle of asymptotes
Where P = no. of poles
Z = No. of zeros
On replacing the values
The
Breakaway point is calculated as:
To calculate breakaway point, replace
So,
Breakaway point is
Calculating the value of
For Stability
Auxiliary equation is defined as:
Replace the value of
This is the point on the imaginary axis
Root locus plot of the characteristic equation is
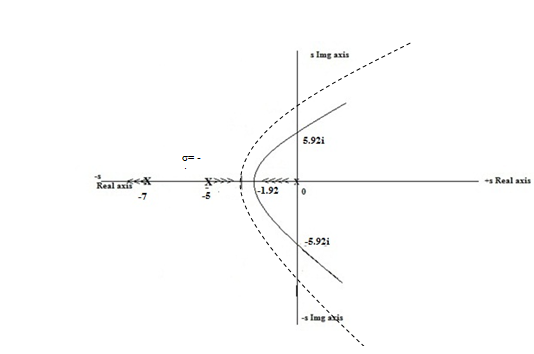
Fig.4
Conclusion:
Root has been plotted for the given characteristic equation is shown in Fig4.
(e)
The root locus of the given characteristic equation
Explanation of Solution
Given:
Concept Used:
Root Locus technique.
Calculation:
The characteristic equation is defined as
Where,
Therefore, Poles are
And zero is
Total number of branches is
Centroid is calculated as:
Where poles are
Angle of asymptotes is calculated as:
Angle of asymptotes
Where P = no. of poles
Z = No. of zeros
On replacing the values
The
Breakaway point is calculated as:
To calculate breakaway point, replace
So,
Breakaway point is
Calculating the value of
For Stability
Auxiliary equation is defined as:
Replace the value of
This is the point on the imaginary axis
Root locus plot of the characteristic equation is
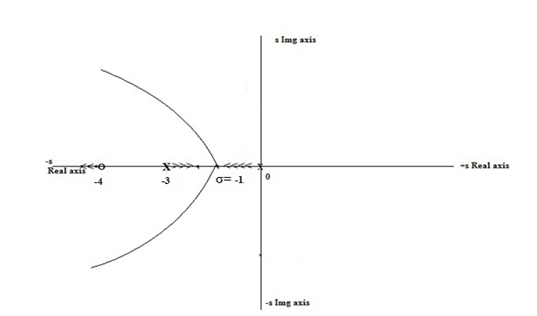
Fig.5
Conclusion:
Root has been plotted for the given characteristic equation is shown in Fig.5.
(f)
The root locus of the given characteristic equation
Explanation of Solution
Given:
Concept Used:
Root Locus technique.
Calculation:
The characteristic equation is defined as
Where,
Therefore, Poles are
And zero is
Total number of branches is
Centroid is calculated as:
Where poles are
Angle of asymptotes is calculated as:
Angle of asymptotes
Where P = no. of poles
Z = No. of zeros
On replacing the values
The
Breakaway point is calculated as:
To calculate breakaway point, replace
So,
Breakaway point is
Calculating the value of
For Stability
Auxiliary equation is defined as:
Replace the value of
For
For
Root locus plot of the characteristic equation is
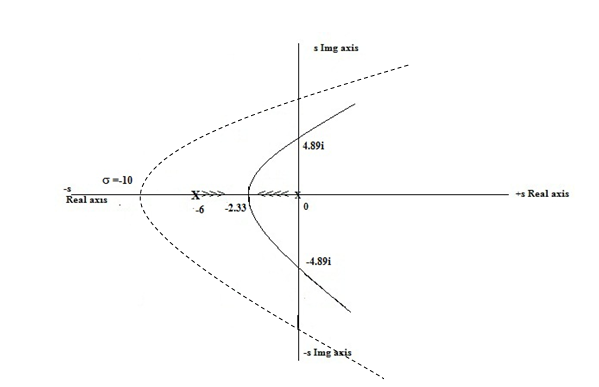
Fig.6
Conclusion:
Root has been plotted for the given characteristic equation is shown in Fig6.
Want to see more full solutions like this?
Chapter 11 Solutions
EBK SYSTEM DYNAMICS


- Solve, use engineering economic tablesarrow_forwardSolve, use engineering economic tablesarrow_forwardA pinion has a pressure angle of 20 degrees a module of 3mm and 20 teeth. It is meshed with a gear having 32 teeth. The center distance between the shafts is 81mm. Determine the gear ratio and diametral pitch .arrow_forward
- USE MATHLAB WITH CODES Estimate the damping ratio, stiffness, natural frequency, and mass of the SDOF system. Please use a MATHLAB with CODES and no negative damping ratio. Data Set 1:Time(s) Data Set 1:top1(g) Data Set 1:bottom(g)0 0.002593181 0.007262860.01 0.011367107528507709 -0.0015110660.02 0.007467585 -0.0058980290.029999999999999999 0.004542943 0.0028758970.040000000000000001 0.018678712689042091 -0.0019985060.050000000000000003 0.004542943 0.0009261360.059999999999999998 0.014779189431130886 -0.0068729090.070000000000000007 0.004055502 -0.0088226710.080000000000000002 0.008442465 -0.0015110660.089999999999999997 0.011854547366917134 -0.0039482670.10000000000000001 0.007467585 0.0058005390.11 0.004055502 0.0043382180.12 0.010392226334810257 0.0019010160.13 0.010392226334810257 -0.001998506% 0.14000000000000001 0.016728950301647186 0.0048256580.14999999999999999 0.007955025…arrow_forwardProvide an example of at least five features produced by a certain machining process (for example, a keyway to accommodate a key iarrow_forwardHow to draw a gam from the data of the subject's readings three times and difficulties in drawing a gam Material Name: Machinery Theory I'm a vehicle engineering student. Please describe details about gam in addition the law gam: 1-tangent cam with reciprocating roller follower. 2-circular arc cam with flat-faced follower.arrow_forward
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY