
Videos
(a)
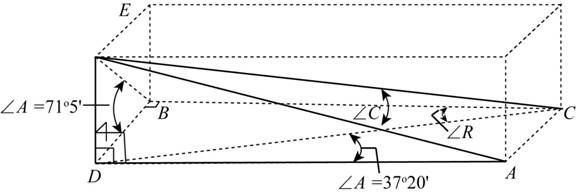
The sketch and label of a rectangular solid and the pyramid formed by the angular surface edges.
Answer to Problem 13A
The sketch and label of a rectangular solid and the pyramid formed by the angular surface edges is
Explanation of Solution
Consider the angle
There are mainly three types of views such as top view, front view and right side view. The rectangular solid and pyramid is formed using the trihedral method. In this method all the planes are perpendicular to each other and eight right triangles are formed. The object is placed in these right angles to take the projection.
The steps of the sketching of the rectangular solid and the pyramid formed by the surface to be cut and the extended sides of the block are following.
1.Draw a rectangular solid surface block.
2.Draw triangles on the extended surface of the rectangular solid surface block.
3.Cut the extended surface of the rectangular solid surface block as per the drawn triangle on the surface of the block to form a pyramid on the extended sides of the block.
4.The sketch of a pyramid formed on surface of the extended sides of the rectangular solid surface block.
5.Identify the angle
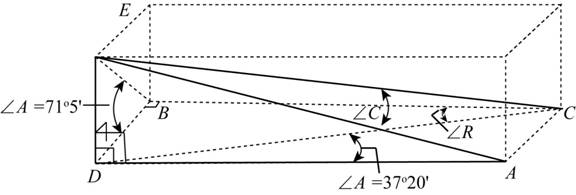
Figure-(1)
(b)
The angle
Answer to Problem 13A
The angle
Explanation of Solution
Write the expression for the angle
Here, the length of the side
Write the expression for the angle
Here, the length of the side
Write the expression for the angle
Here, the length of the side
Calculation:
Consider the length of the side
Substitute
Substitute
The length of the side
Substitute
Conclusion:
The angle
(c)
The angle
Answer to Problem 13A
The angle
Explanation of Solution
Write the expression for the angle
Write the expression for the angle
Calculation:
Consider the length of the side
Substitute
Substitute
Conclusion:
The angle
Want to see more full solutions like this?
Chapter 76 Solutions
EBK MATHEMATICS FOR MACHINE TECHNOLOGY


- To manage the production of an animated movie, Pixar Animation Studios has listed the major activities involved, the predecessor relationships, and activity times (in months). The project is completed when activities F and G are both complete. Activity Immediate Predecessor G A B CD E A A C, B C, B D, E Time 4 6 2 6 3 3 5 (a) Find the critical path. (Enter your answers as a comma-separated list.) (b) The project must be completed in 1.5 years. Do you anticipate difficulty in meeting the deadline? Explain. The critical path activities require months to complete. Thus the project ---Select--- be completed in 1.5 years.arrow_forwardTo help with preparations, a couple has devised a project network to describe the activities that must be completed by their wedding date. In addition, they have estimated the time of each activity (in weeks). Start D F B E G Activity A B C DEFGH Time 5 3 6 6 6 3 11 10 (a) Identify the critical path. (Enter your answers as a comma-separated list.) H Finish (b) How much time (in weeks) will be needed to complete this project? week(s) (c) Can activity D be delayed without delaying the entire project? If so, by how many weeks? (If the activity can not be delayed, enter 0.) week(s) (d) Can activity C be delayed without delaying the entire project? If so, by how many weeks? (If the activity can not be delayed, enter 0.) week(s) (e) What is the schedule for activity E (in weeks)? Earliest Start Latest Start Earliest Finish Latest Finish week(s) week(s) week(s) week(s)arrow_forward30.6. Classify the zeros and singularities of the functions tanz (a). f(z)=sin(1-2-1), (b). f(2) = (c). f(z)= tanh .arrow_forward
- 1. Locate the singularities of three of the following functions, and determine their type. (a) f(z)=2(z-sinz). (b) f(z) = (-) (c) f(z) = (z+2-22²)-1 (d) f(z) = sinzarrow_forwardQ 2/classify the zeros and poles of the function f(z) = tanz Zarrow_forward30.1. Show that z = 0 is a removable singularity of the following functions. Furthermore, define f(0) such that these functions are analytic at z = 0. (a). f(z) = 2 sin z- z 1-12² - cos z (b). f(z) = (c). f(z) = sin 22arrow_forward
- 3. Consider the polynomial equation 6-iz+7z² -iz³ +z = 0 for which the roots are 3i, -2i, -i, and i. (a) Verify the relations between this roots and the coefficients of the polynomial. (b) Find the annulus region in which the roots lie.arrow_forward30.3. Find and classify the isolated singularities of the following func- tions: (a). 23+1 22(2-1) (b). ²e¹/, (c). sin 3z (d). COS 2arrow_forward3. Consider the polynomial equation 6-iz+7z2-iz³ +z = 0 for which the roots are 3i, -2i, -i, and i. (a) Verify the relations between this roots and the coefficients of the polynomial. (b) Find the annulus region in which the roots lie.arrow_forward
- Determine the set of odd primes p for which 23 is a quadratic residue.arrow_forwardQ/ Find and classify the singularities of the functions- = 52+3 (1-2) sin² Z a fcz) b f(z) = tanz Z © f(2)= [z (e²-1)]arrow_forwardA linear programming computer package is needed. As part of the settlement for a class action lawsuit, Hoxworth Corporation must provide sufficient cash to make the following annual payments (in thousands of dollars). Year 1 2 2 3 4 5 6 Payment 210 235 260 305 335 480 The annual payments must be made at the beginning of each year. The judge will approve an amount that, along with earnings on its investment, will cover the annual payments. Investment of the funds will be limited to savings (at 4% annually) and government securities, at prices and rates currently quoted in The Wall Street Journal. Hoxworth wants to develop a plan for making the annual payments by investing in the following securities (par value = $1,000). Funds not invested in these securities will be placed in savings. Security Current Price Rate (%) Years to Maturity 1 2 $1,055 $1,000 6.750 5.125 3 4 Assume that interest is paid annually. The plan will be submitted to the judge and, if approved, Hoxworth will be…arrow_forward
 Elementary Geometry For College Students, 7eGeometryISBN:9781337614085Author:Alexander, Daniel C.; Koeberlein, Geralyn M.Publisher:Cengage,
Elementary Geometry For College Students, 7eGeometryISBN:9781337614085Author:Alexander, Daniel C.; Koeberlein, Geralyn M.Publisher:Cengage, Elementary Geometry for College StudentsGeometryISBN:9781285195698Author:Daniel C. Alexander, Geralyn M. KoeberleinPublisher:Cengage Learning
Elementary Geometry for College StudentsGeometryISBN:9781285195698Author:Daniel C. Alexander, Geralyn M. KoeberleinPublisher:Cengage Learning Holt Mcdougal Larson Pre-algebra: Student Edition...AlgebraISBN:9780547587776Author:HOLT MCDOUGALPublisher:HOLT MCDOUGAL
Holt Mcdougal Larson Pre-algebra: Student Edition...AlgebraISBN:9780547587776Author:HOLT MCDOUGALPublisher:HOLT MCDOUGAL Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,
Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,
 Algebra for College StudentsAlgebraISBN:9781285195780Author:Jerome E. Kaufmann, Karen L. SchwittersPublisher:Cengage Learning
Algebra for College StudentsAlgebraISBN:9781285195780Author:Jerome E. Kaufmann, Karen L. SchwittersPublisher:Cengage Learning