
Concept explainers
Videos
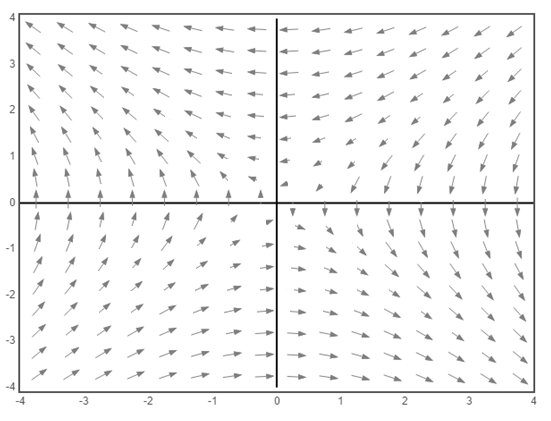
Interpretation:
To sketch the
Concept Introduction:
The system assigns a vector
Substitute the given system in the equation
The stable manifold of a fixed point is the set of all points in the plane which tends to the fixed point as time goes to positiveinfinity.
The unstable manifold for a fixed point is the set of all points in the plane which tends to the fixed point as time goes to negative infinity.
Answer to Problem 9E
Solution:
a) The vector field of the system
b) It is shown that the trajectories of the system are hyperbolas of the form
c) The equations for the stable and unstable manifolds for origin are
d) The solutions in terms of new variables
e) The equations for the stable and unstable manifolds in terms of
f) The general solution for
Explanation of Solution
a) The vector field of the given system
b) Consider the given system,
It can be shown that the trajectories of the system are hyperbolas of the form
Substituting
Thus, the given system implies
Integrating the above equation,
Thus, the trajectory of the given system is the hyperbola of the form
c) The origin is a saddle point for the given system. From the sketch of the vector field, it is clear that the equation
Also, the equation
This can also be proved by substituting
This linear system gives a stable fixed point.
Similarly, substituting
This linear system gives an unstable fixed point.
Therefore, the equations for the stable and unstable manifolds for origin is
d) Introducing new variables
The system can be rewritten as
Substituting
Again, substituting
The above equation can be also represented as
Solving for the initial conditions,
Substituting
Substituting the value of
Similarly substituting
Again, substituting
The above equation can be also represented as
Solving for the initial conditions,
Substituting
Substituting the value of
Hence, the solutions of the linear equation for the initial condition
e) Since the equations of the stable and unstable manifold are
Therefore, substituting
Similarly, substituting
Thus,
f) Since
Solving the above equations to get the values of
Substituting
Again, substituting
Similarly, substituting
Again, substituting
Therefore, the general solution for
Want to see more full solutions like this?
Chapter 5 Solutions
Nonlinear Dynamics and Chaos


- In this exercise, we will investigate a technique to prove that a language is notregular. This tool is called the pumping lemma.The pumping lemma says that if M = (S, I, f, s0, F ) is a DFA with p states (i.e., p = |S|) and if the wordw is in L(M ) (the language generated by M ) and w has length greater than or equal to p, then w may bedivided into three pieces, w = xyz, satisfying the following conditions:1. For each i ∈ N, xy^i z ∈ L(M ).2. |y| > 0 (i.e., y contains at least one character).3. |xy| ≤ p (i.e., the string xy has at most p characters). Use the pumping lemma to show the following language is not regular (HINT: Use proof by contradictionto assume the language is regular and apply the pumping lemma to the language):L = {0^k1^k | k ∈ N}arrow_forwardA prefix of length ℓ of some word w are the first ℓ characters (in order) of w.1. Construct a context-free grammar for the language: L = {w ∈ {a, b}∗ | every prefix of w has at least as many a’s as b’s}2. Explain why every word generated by your context-free grammar (in Part 1) is contained in L. Then,prove via induction that every w ∈ L is produced by your context-free grammar.arrow_forwardConsider a simplified version of American football where on any possession ateam can earn 0, 3 or 7 points. What is the smallest number n0 of points such that for all n ≥ n0 and n ∈ Na team could earn n points. You must prove that your answer is correct via induction (HINT: Don’t forgetto show that n0 is the smallest number above which any number of points is reachable).arrow_forward
- Consider a vocabulary consisting of the nucleotide bases V = {A, T, G, C}.Construct a DFA to recognize strings which end in AAGT .(a) Draw the DFA with clear markings of all states including start and acceptance state(s).(b) Simulate the DFA to show that string T GAAGT will be accepted by the DFA.(c) Simulate the DFA to show that string T AAGT G will not be accepted by the DFA.arrow_forwardA palindrome is a string that reads the same backward as it does forward. For example, abaaaba is a palindrome. Suppose that we need to define a language that generates palindromes.(a) Define a phase structure grammar that generates the set of all palindromes over the alphabet {a, b}clearly describing the recursive rules that generates palindromes. Use the notation Symbol → rule. Theempty set is denoted by λ. Clearly identify the terminal and non-terminal symbols in your grammar.(b) Show that the palindrome abaaaba can be recognized by your grammar. To show this, show all stepsof parsing the expression abaaaba using the rules you defined above.arrow_forwardA full k-ary tree is a (rooted) tree whose nodes either have exactly k children (internal nodes) or have no children (leaves). Using structural induction, formally prove that every full k-ary tree that has x internal nodes has exactly kx + 1 nodes in total. Note that for full binary trees, i.e., when k = 2, this would imply that the total number of nodes is 2x + 1.arrow_forward
- W AutoSave Off Soal Latihan Matdis (1) ▼ Search File Home Insert Draw Design Layout References Mailings Review View Help Aptos (Body) ✓ 12 A A Aa Ро Paste BI U ab x, x² A ✓ A ད Clipboard ₪ 24 23 22 21 20 19 18 17 16 15 1″ ידידיו Page 1 of 1 25°C 215 words Berawan E> M Font 四 Paragraph 3 4 1 56 ☑ 781 LI Comments Editing Find ✓ Normal No Spacing Heading Replace Add-ins Select Styles ☑ Editing Add-ins 91 10 111 12 | 13| 14 15 5. Suppose you wanted to draw a quadrilateral using the dots below as vertices (corners). The dots are spaced one unit apart horizontally and two units apart vertically. a) How many quadrilaterals are possible? b) How many are squares? How many are rectangles? c) How many are parallelograms? English (Indonesia) Accessibility: Investigate R - W ☑ Share ▾ Focus + 100% 00:17 13/04/2025arrow_forward2. Show that 8 xa S -dx (b² + 12) dr = 2 cos(π2) пра-1 a, b real and -1 0 Your solution should clearly explain the closed contour you are using, and state clearly any vanishing properties of integrals over contours that are being used. You are free to quote from the lectures, the appropriate results on such vanishing properties, without deriving these properties. Any residue calculations involved should be explained clearly.arrow_forward1. Calculate the integral 500 x sin x (a² +x2)20 dx by using the residue theorem. You may assume that a is real and a > 0. Your solution should clearly explain the closed contour you are using, and state clearly any vanishing properties of integrals over contours that are being used.arrow_forward
- Steel Production Planning: Let S represent the amount of steel produced (in tons). Steel Production is related to the amount of labor used(L) and the amount of capital used ( C ) by the following function:S = 20L⁰˙³⁰C⁰˙⁷⁰In this formula L represents the units of Labor input and C the units of Capital input. Each unit of Labor costs $50, and each unit of Capital costs $100. a:Formulate an optimization problem that will determine how much labor and capital are needed to produce 50,000 tons of steel at minimum cost. Q#3B: Solve the optimization problem you formulated in part (a). (Hint: When using Excel Solver, start with an initial L>0 and C>0.)…arrow_forwardQ/Draw the graph k 3,4, and extract perfect ma ching from itarrow_forwardπ sin2x sin3x sin5x sin30x sinx - sin6x - sin10x - sin15x) 2 dxarrow_forward
 Elementary Linear Algebra (MindTap Course List)AlgebraISBN:9781305658004Author:Ron LarsonPublisher:Cengage Learning
Elementary Linear Algebra (MindTap Course List)AlgebraISBN:9781305658004Author:Ron LarsonPublisher:Cengage Learning Elementary Geometry For College Students, 7eGeometryISBN:9781337614085Author:Alexander, Daniel C.; Koeberlein, Geralyn M.Publisher:Cengage,
Elementary Geometry For College Students, 7eGeometryISBN:9781337614085Author:Alexander, Daniel C.; Koeberlein, Geralyn M.Publisher:Cengage,