Videos
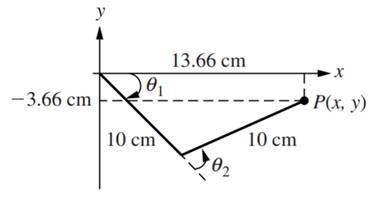
Consider a two-link planar robot oriented in the elbow-up position as shown in Fig. P3.27. If the lip of the robot is located at the point
Want to see the full answer?
Check out a sample textbook solution
Chapter 3 Solutions
Introductory Mathematics for Engineering Applications
Additional Math Textbook Solutions
Basic Business Statistics, Student Value Edition
Calculus: Early Transcendentals (2nd Edition)
Elementary Statistics
Elementary Statistics (13th Edition)
Elementary Statistics: Picturing the World (7th Edition)
College Algebra (7th Edition)


- Sociobiology and crime.arrow_forwardConsider the linear system whose augmented matrix is [1 1 1 1 1] 1 2 3 4 5 Identify which variables are basic and which variables are free, and then give the general solution of this system by expressing the basic variables in terms of the free variables. Show all of your work.arrow_forward-0-3-0-8 10 = = 5 Determine if w can be written as a linear combination of V1, V2, and v3. Show all of your work and justify your conclusions.arrow_forward
- Q1.2 1 Point Which of the following best describes Span O a point two points a line O a plane O all of R³ Save Answer Q1.3 1 Point Which of the following best describes Span O a point two points a line O a plane O all of R³ Save Answer Q1.4 1 Point Which of the following best describes Span O a point O three points a line O a plane O all of R³ Save Answerarrow_forward3/5 as a percentagearrow_forward1 2/3 divided by 3/4arrow_forward
- If xs2 + yt2 = 1, and x2s + y2t = xy − 4, find ∂x/∂s, ∂x/∂t, ∂y/∂s, ∂y/∂t at (x, y, s, t) = (1, −3, 2, −1).Hint: do the derivatives first before inserting numerical values.arrow_forwardNot use ai pleasearrow_forwardPlease ensure that all parts of the question are answered thoroughly and clearly. Include a diagram to help explain answers. Make sure the explanation is easy to follow. Would appreciate work done written on paper. Thank you.arrow_forward
- Please ensure that all parts of the question are answered thoroughly and clearly. Include a diagram to help explain answers. Make sure the explanation is easy to follow. Would appreciate work done written on paper. Thank you.arrow_forwardPlease ensure that all parts of the question are answered thoroughly and clearly. Include a diagram to help explain answers. Make sure the explanation is easy to follow. Would appreciate work done written on paper. Thank you.arrow_forwardPlease ensure that all parts of the question are answered thoroughly and clearly. Include a diagram to help explain answers. Make sure the explanation is easy to follow. Would appreciate work done written on paper. Thank you.arrow_forward
 Algebra & Trigonometry with Analytic GeometryAlgebraISBN:9781133382119Author:SwokowskiPublisher:Cengage
Algebra & Trigonometry with Analytic GeometryAlgebraISBN:9781133382119Author:SwokowskiPublisher:Cengage Trigonometry (MindTap Course List)TrigonometryISBN:9781337278461Author:Ron LarsonPublisher:Cengage Learning
Trigonometry (MindTap Course List)TrigonometryISBN:9781337278461Author:Ron LarsonPublisher:Cengage Learning Trigonometry (MindTap Course List)TrigonometryISBN:9781305652224Author:Charles P. McKeague, Mark D. TurnerPublisher:Cengage Learning
Trigonometry (MindTap Course List)TrigonometryISBN:9781305652224Author:Charles P. McKeague, Mark D. TurnerPublisher:Cengage Learning Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,
Mathematics For Machine TechnologyAdvanced MathISBN:9781337798310Author:Peterson, John.Publisher:Cengage Learning,