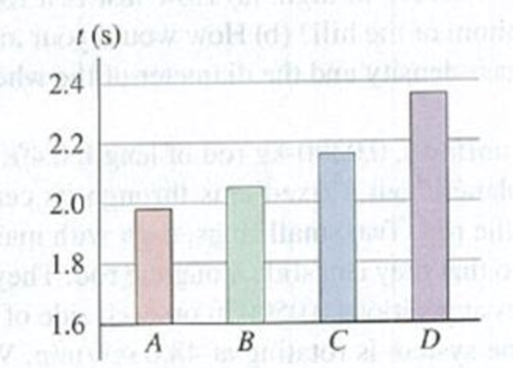
DATA You have one object of each of these shapes, all with mass 0.840 kg: a uniform solid cylinder, a thin-walled hollow cylinder, a uniform solid sphere, and a thin-walled hollow sphere. You release each object from rest at the same vertical height h above the bottom of a long wooden ramp that is inclined at 35.0° from the horizontal. Each object rolls without slipping down the ramp. You measure the time t that it takes each one to reach the bottom of the ramp; Fig. P10.89 shows the results, (a) From the bar graphs, identify objects A through D by shape, (b) Which of objects A through D has the greatest total kinetic energy at the bottom of the ramp, or do all have the same kinetic energy? (c) Which of objects A through D has the greatest rotational kinetic energy 1 2 I ω 2 at the bottom of the ramp, or do all have the same rotational kinetic energy? (d) What minimum coefficient of static friction is required for all four objects to roll without slipping? Figure P10.89
DATA You have one object of each of these shapes, all with mass 0.840 kg: a uniform solid cylinder, a thin-walled hollow cylinder, a uniform solid sphere, and a thin-walled hollow sphere. You release each object from rest at the same vertical height h above the bottom of a long wooden ramp that is inclined at 35.0° from the horizontal. Each object rolls without slipping down the ramp. You measure the time t that it takes each one to reach the bottom of the ramp; Fig. P10.89 shows the results, (a) From the bar graphs, identify objects A through D by shape, (b) Which of objects A through D has the greatest total kinetic energy at the bottom of the ramp, or do all have the same kinetic energy? (c) Which of objects A through D has the greatest rotational kinetic energy 1 2 I ω 2 at the bottom of the ramp, or do all have the same rotational kinetic energy? (d) What minimum coefficient of static friction is required for all four objects to roll without slipping? Figure P10.89
DATA You have one object of each of these shapes, all with mass 0.840 kg: a uniform solid cylinder, a thin-walled hollow cylinder, a uniform solid sphere, and a thin-walled hollow sphere. You release each object from rest at the same vertical height h above the bottom of a long wooden ramp that is inclined at 35.0° from the horizontal. Each object rolls without slipping down the ramp. You measure the time t that it takes each one to reach the bottom of the ramp; Fig. P10.89 shows the results, (a) From the bar graphs, identify objects A through D by shape, (b) Which of objects A through D has the greatest total kinetic energy at the bottom of the ramp, or do all have the same kinetic energy? (c) Which of objects A through D has the greatest rotational kinetic energy
1
2
I
ω
2
at the bottom of the ramp, or do all have the same rotational kinetic energy? (d) What minimum coefficient of static friction is required for all four objects to roll without slipping?
You're on an interplanetary mission, in an orbit around the Sun. Suppose you make a maneuver that brings your perihelion in closer to the Sun but leaves your aphelion unchanged. Then you must have
Question 2 options:
sped up at perihelion
sped up at aphelion
slowed down at perihelion
slowed down at aphelion
The force of the quadriceps (Fq) and force of the patellar tendon (Fp) is identical (i.e., 1000 N each). In the figure below angle in blue is Θ and the in green is half Θ (i.e., Θ/2). A) Calculate the patellar reaction force (i.e., R resultant vector is the sum of the horizontal component of the quadriceps and patellar tendon force) at the following joint angles: you need to provide a diagram showing the vector and its components for each part. a1) Θ = 160 degrees, a2) Θ = 90 degrees. NOTE: USE ONLY TRIGNOMETRIC FUNCTIONS (SIN/TAN/COS, NO LAW OF COSINES, NO COMPLICATED ALGEBRAIC EQUATIONS OR ANYTHING ELSE, ETC. Question A has 2 parts!
The force of the quadriceps (Fq) and force of the patellar tendon (Fp) is identical (i.e., 1000 N each). In the figure below angle in blue is Θ and the in green is half Θ (i.e., Θ/2). A) Calculate the patellar reaction force (i.e., R resultant vector is the sum of the horizontal component of the quadriceps and patellar tendon force) at the following joint angles: you need to provide a diagram showing the vector and its components for each part. a1) Θ = 160 degrees, a2) Θ = 90 degrees. NOTE: USE DO NOT USE LAW OF COSINES, NO COMPLICATED ALGEBRAIC EQUATIONS OR ANYTHING ELSE, ETC. Question A has 2 parts!
Chapter 10 Solutions
University Physics with Modern Physics, Volume 2 (Chs. 21-37); Mastering Physics with Pearson eText -- ValuePack Access Card (14th Edition)
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, physics and related others by exploring similar questions and additional content below.




 Principles of Physics: A Calculus-Based TextPhysicsISBN:9781133104261Author:Raymond A. Serway, John W. JewettPublisher:Cengage Learning
Principles of Physics: A Calculus-Based TextPhysicsISBN:9781133104261Author:Raymond A. Serway, John W. JewettPublisher:Cengage Learning Glencoe Physics: Principles and Problems, Student...PhysicsISBN:9780078807213Author:Paul W. ZitzewitzPublisher:Glencoe/McGraw-Hill
Glencoe Physics: Principles and Problems, Student...PhysicsISBN:9780078807213Author:Paul W. ZitzewitzPublisher:Glencoe/McGraw-Hill Physics for Scientists and Engineers: Foundations...PhysicsISBN:9781133939146Author:Katz, Debora M.Publisher:Cengage Learning
Physics for Scientists and Engineers: Foundations...PhysicsISBN:9781133939146Author:Katz, Debora M.Publisher:Cengage Learning University Physics Volume 1PhysicsISBN:9781938168277Author:William Moebs, Samuel J. Ling, Jeff SannyPublisher:OpenStax - Rice University
University Physics Volume 1PhysicsISBN:9781938168277Author:William Moebs, Samuel J. Ling, Jeff SannyPublisher:OpenStax - Rice University Physics for Scientists and EngineersPhysicsISBN:9781337553278Author:Raymond A. Serway, John W. JewettPublisher:Cengage Learning
Physics for Scientists and EngineersPhysicsISBN:9781337553278Author:Raymond A. Serway, John W. JewettPublisher:Cengage Learning Physics for Scientists and Engineers with Modern ...PhysicsISBN:9781337553292Author:Raymond A. Serway, John W. JewettPublisher:Cengage Learning
Physics for Scientists and Engineers with Modern ...PhysicsISBN:9781337553292Author:Raymond A. Serway, John W. JewettPublisher:Cengage Learning