where g=9.8 m/s, mc is the cart's mass, m is the mass of the pole, I is the half length of the pole, and u is the applied force. a) b) Find a linearized state equation if the desired equilibrium value for each state is zero. Find a linearized state equation if it is desired to position the pendulum at a 45°.
where g=9.8 m/s, mc is the cart's mass, m is the mass of the pole, I is the half length of the pole, and u is the applied force. a) b) Find a linearized state equation if the desired equilibrium value for each state is zero. Find a linearized state equation if it is desired to position the pendulum at a 45°.

Introductory Circuit Analysis (13th Edition)
13th Edition
ISBN:9780133923605
Author:Robert L. Boylestad
Publisher:Robert L. Boylestad
Chapter1: Introduction
Section: Chapter Questions
Problem 1P: Visit your local library (at school or home) and describe the extent to which it provides literature...

Related questions

Question

**Figure 1.** Inverted pendulum schematic.
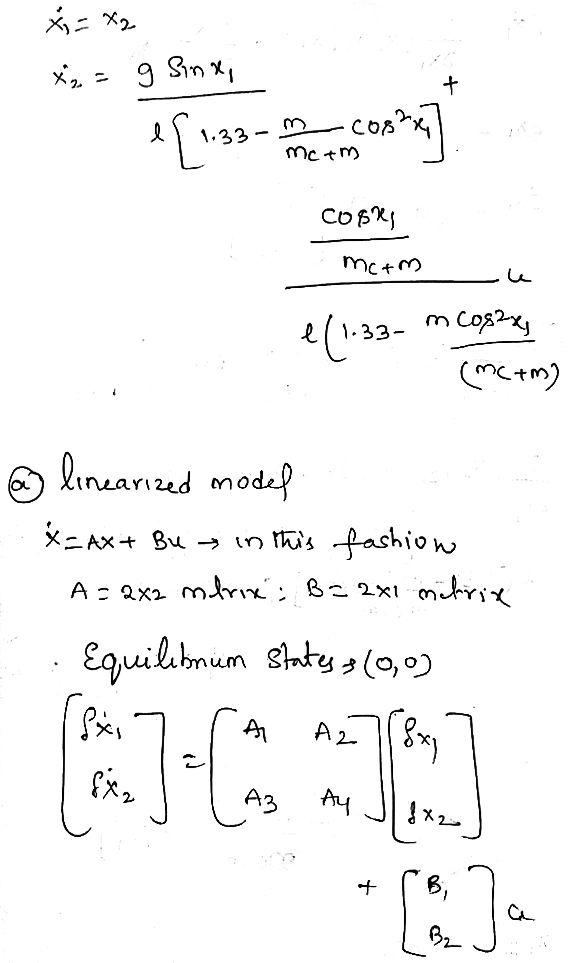
The state variables for this system can be defined to be: \( x_1(t) = \theta(t) \), \( x_2(t) = \dot{\theta}(t) \). Assume that the equation of motion for the pendulum can be written as follows:
\[
\begin{bmatrix}
\dot{x}_1 \\
\dot{x}_2
\end{bmatrix}
=
\begin{bmatrix}
x_2 \\
\frac{g \sin(x_1)}{l \left(\frac{4}{3} - \frac{m \cos^2(x_1)}{m_c + m}\right)} + \frac{\cos(x_1)}{l \left(\frac{4}{3} - \frac{m \cos^2(x_1)}{m_c + m}\right)} u
\end{bmatrix}
\]
**Explanation:**
- **Diagram:** The figure shows a schematic of an inverted pendulum mounted on a cart. The cart moves horizontally, and the pendulum pivots about its base, depicting the angle \( \theta = x_1 \).
- **Forces:** The forces acting on the pendulum include gravitational force \( mg \sin \theta \) and control input \( u \) which affects the motion of the cart.
- **Variables:**
- \( x_1(t) = \theta(t) \): Angle of the pendulum with the vertical.
- \( x_2(t) = \dot{\theta}(t) \): Angular velocity of the pendulum.
- **Equation of Motion:** Describes how the system evolves over time, considering both the gravitational force and external input \( u \). The complexity arises from the terms involving trigonometric functions \( \sin(x_1) \) and \( \cos(x_1) \), reflecting the pendulum's rotation dynamics.](/v2/_next/image?url=https%3A%2F%2Fcontent.bartleby.com%2Fqna-images%2Fquestion%2F85e4b871-9d1c-4ae2-b799-fb57954f3d49%2F6ef426f9-c341-4e0d-a05f-3749bcf4058e%2Fgk7z65_processed.jpeg&w=3840&q=75)
Transcribed Image Text:**Problem 2.** Consider the inverted pendulum on a cart given in Figure 1.

**Figure 1.** Inverted pendulum schematic.
The state variables for this system can be defined to be: \( x_1(t) = \theta(t) \), \( x_2(t) = \dot{\theta}(t) \). Assume that the equation of motion for the pendulum can be written as follows:
\[
\begin{bmatrix}
\dot{x}_1 \\
\dot{x}_2
\end{bmatrix}
=
\begin{bmatrix}
x_2 \\
\frac{g \sin(x_1)}{l \left(\frac{4}{3} - \frac{m \cos^2(x_1)}{m_c + m}\right)} + \frac{\cos(x_1)}{l \left(\frac{4}{3} - \frac{m \cos^2(x_1)}{m_c + m}\right)} u
\end{bmatrix}
\]
**Explanation:**
- **Diagram:** The figure shows a schematic of an inverted pendulum mounted on a cart. The cart moves horizontally, and the pendulum pivots about its base, depicting the angle \( \theta = x_1 \).
- **Forces:** The forces acting on the pendulum include gravitational force \( mg \sin \theta \) and control input \( u \) which affects the motion of the cart.
- **Variables:**
- \( x_1(t) = \theta(t) \): Angle of the pendulum with the vertical.
- \( x_2(t) = \dot{\theta}(t) \): Angular velocity of the pendulum.
- **Equation of Motion:** Describes how the system evolves over time, considering both the gravitational force and external input \( u \). The complexity arises from the terms involving trigonometric functions \( \sin(x_1) \) and \( \cos(x_1) \), reflecting the pendulum's rotation dynamics.

Transcribed Image Text:where \( g = 9.8 \, \text{m/s}^2 \), \( m_c \) is the cart's mass, \( m \) is the mass of the pole, \( l \) is the half length of the pole, and \( u \) is the applied force.
a) Find a linearized state equation if the desired equilibrium value for each state is zero.
b) Find a linearized state equation if it is desired to position the pendulum at a \( 45^\circ \).
Expert Solution
Step 1

Step by step
Solved in 5 steps with 5 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, electrical-engineering and related others by exploring similar questions and additional content below.Recommended textbooks for you
Introductory Circuit Analysis (13th Edition)
Electrical Engineering
ISBN:
9780133923605
Author:
Robert L. Boylestad
Publisher:
PEARSON

Delmar's Standard Textbook Of Electricity
Electrical Engineering
ISBN:
9781337900348
Author:
Stephen L. Herman
Publisher:
Cengage Learning

Programmable Logic Controllers
Electrical Engineering
ISBN:
9780073373843
Author:
Frank D. Petruzella
Publisher:
McGraw-Hill Education
Introductory Circuit Analysis (13th Edition)
Electrical Engineering
ISBN:
9780133923605
Author:
Robert L. Boylestad
Publisher:
PEARSON
Delmar's Standard Textbook Of Electricity
Electrical Engineering
ISBN:
9781337900348
Author:
Stephen L. Herman
Publisher:
Cengage Learning
Programmable Logic Controllers
Electrical Engineering
ISBN:
9780073373843
Author:
Frank D. Petruzella
Publisher:
McGraw-Hill Education

Fundamentals of Electric Circuits
Electrical Engineering
ISBN:
9780078028229
Author:
Charles K Alexander, Matthew Sadiku
Publisher:
McGraw-Hill Education

Electric Circuits. (11th Edition)
Electrical Engineering
ISBN:
9780134746968
Author:
James W. Nilsson, Susan Riedel
Publisher:
PEARSON

Engineering Electromagnetics
Electrical Engineering
ISBN:
9780078028151
Author:
Hayt, William H. (william Hart), Jr, BUCK, John A.
Publisher:
Mcgraw-hill Education,