
Concept explainers
Videos
A point at a 6.5-in radius is on a body that is in pure rotation with
- Write an expression for the particle's acceleration vector in position
- Write an expression for the particle's acceleration vector in position
- Write a vector equation for the acceleration difference between points
vectors in this equation and solve for the acceleration difference numerically. - Check the result of part c with a graphical method.
(a)
An expression for the particle’s acceleration vector in position A.
Answer to Problem 7.1P
Acceleration in polar form is
Acceleration in cartesian form is
Explanation of Solution
Calculation:
Compute the angular velocity at point B.
Here,
Substitute
Calculate the angular position at point B.
Here,
Substitute
Compute the magnitude of the normal component of acceleration at point A.
Here,
Compute the direction of the normal component of acceleration at point A.
Compute the magnitude of the tangential component of acceleration at point A.
Here,
Compute the direction of the tangential component of acceleration at point A.
Compute the magnitude of the normal component of acceleration at point B.
Here,
Compute the direction of the normal component of acceleration at point B.
Compute the magnitude of the tangential component of acceleration at point B.
Here,
Compute the direction of the tangential component of acceleration at point A.
Draw the position vector diagram.
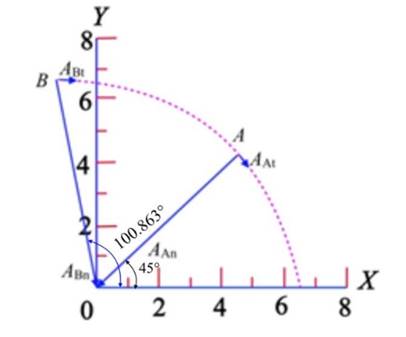
Computer polar form by using the formula.
Calculate the velocity at point A.
Compute the acceleration vector in position A by the following formula.
Compute the acceleration vector of position A in cartesian form.
Therefore, the acceleration of point A is
(b)
An expression for the particle’s acceleration vector in position B.
Answer to Problem 7.1P
Acceleration in polar form is
Acceleration in cartesian form is
Explanation of Solution
Calculation:
Compute the angular velocity at point B.
Here,
Substitute
Calculate the angular position at point B.
Here,
Substitute
Compute the magnitude of the normal component of acceleration at point A.
Here,
Compute the direction of the normal component of acceleration at point A.
Compute the magnitude of the tangential component of acceleration at point A.
Here,
Compute the direction of the tangential component of acceleration at point A.
Compute the magnitude of the normal component of acceleration at point B.
Here,
Compute the direction of the normal component of acceleration at point B.
Compute the magnitude of the tangential component of acceleration at point B.
Here,
Compute the direction of the tangential component of acceleration at point A.
Draw the position vector diagram.
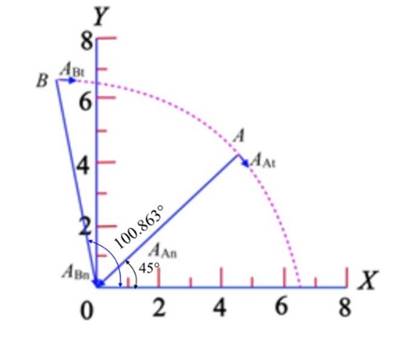
Compute the position vector of point B.
Compute the polar form.
Compute the acceleration vector in position B by the following formula.
Compute the acceleration vector of position B in cartesian form.
(c)
A vector equation for the acceleration difference between points B and A.
Explanation of Solution
Calculation
Calculate the difference in acceleration between the given points.
Therefore, the position difference is
(d)
The answer from the graphical method.
Explanation of Solution
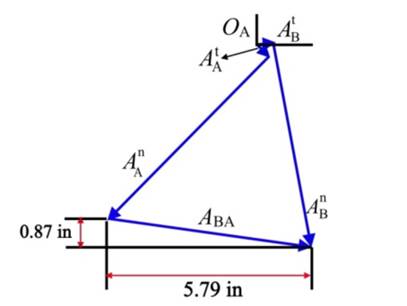
Calculation Solve the equation
Construct the acceleration polygon following the below steps.
- Locate point OA.
- Draw 0.325 in line from the point OA. This represents the velocity of the point
- From the tip of the above line, draw a line of 6.508 in. This represents the acceleration of the point
- From the point OA, draw a 0.325 line which represents the velocity of the point
- From the tip of the point
- From the tip of point
Want to see more full solutions like this?
Chapter 7 Solutions
DESIGN OF MACHINERY


- PROBLEM 3.46 The solid cylindrical rod BC of length L = 600 mm is attached to the rigid lever AB of length a = 380 mm and to the support at C. When a 500 N force P is applied at A, design specifications require that the displacement of A not exceed 25 mm when a 500 N force P is applied at A For the material indicated determine the required diameter of the rod. Aluminium: Tall = 65 MPa, G = 27 GPa. Aarrow_forwardFind the equivalent mass of the rocker arm assembly with respect to the x coordinate. k₁ mi m2 k₁arrow_forward2. Figure below shows a U-tube manometer open at both ends and containing a column of liquid mercury of length l and specific weight y. Considering a small displacement x of the manometer meniscus from its equilibrium position (or datum), determine the equivalent spring constant associated with the restoring force. Datum Area, Aarrow_forward
- 1. The consequences of a head-on collision of two automobiles can be studied by considering the impact of the automobile on a barrier, as shown in figure below. Construct a mathematical model (i.e., draw the diagram) by considering the masses of the automobile body, engine, transmission, and suspension and the elasticity of the bumpers, radiator, sheet metal body, driveline, and engine mounts.arrow_forward3.) 15.40 – Collar B moves up at constant velocity vB = 1.5 m/s. Rod AB has length = 1.2 m. The incline is at angle = 25°. Compute an expression for the angular velocity of rod AB, ė and the velocity of end A of the rod (✓✓) as a function of v₂,1,0,0. Then compute numerical answers for ȧ & y_ with 0 = 50°.arrow_forward2.) 15.12 The assembly shown consists of the straight rod ABC which passes through and is welded to the grectangular plate DEFH. The assembly rotates about the axis AC with a constant angular velocity of 9 rad/s. Knowing that the motion when viewed from C is counterclockwise, determine the velocity and acceleration of corner F.arrow_forward
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY