![Fundamentals of Differential Equations [With CDROM] - 7th Edition](https://www.bartleby.com/isbn_cover_images/9780321410481/9780321410481_smallCoverImage.jpg)
Videos
Rigid Body Nutation. Euler’s equations describe the motion of the principal-axis components of the angular velocity of a freely rotating rigid body (such as a space station), as seen by an observer rotating with the body (the astronauts, for example). This motion is called nutation. If the angular velocity components are denoted by
The trajectory of a solution
a. Show that each trajectory of this system lies on the surface of a (possibly degenerate) sphere centered at the origin
b. Find all the critical points of the system, i.e. all points
c. Show that the trajectories of the system lie along the intersection of a sphere and an elliptic cylinder of the form
d. Using the results of parts (b) and (c), argue that the trajectories of this system are closed curves. What does this say about the corresponding solutions?
e. Figure
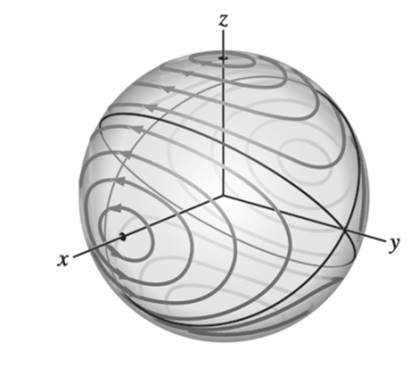
Figure
Want to see the full answer?
Check out a sample textbook solution
Chapter 5 Solutions
Fundamentals of Differential Equations [With CDROM] - 7th Edition


- 10) Multiply (8m + 3)² A) 8m²+11m+6 B) m² + 48m+9 C) 64m²+48m+9 D) 16m²+11m+6arrow_forwardQ/ Solving Laplace equation on a Rectangular Rejon uxxuyy = o u(x, 0) = f(x) исх, 6) = д(х) b) u Co,y) = u(a,y) = =0arrow_forwardQ/solve the heat equation initial-boundary-value problem- u+= 2uxx 4 (x10) = x+\ u (o,t) = ux (4,t) = 0arrow_forward
- not use ai pleasearrow_forwardA graph of the function f is given below: Study the graph of ƒ at the value given below. Select each of the following that applies for the value a = 1 Of is defined at a. If is not defined at x = a. Of is continuous at x = a. If is discontinuous at x = a. Of is smooth at x = a. Of is not smooth at = a. If has a horizontal tangent line at = a. f has a vertical tangent line at x = a. Of has a oblique/slanted tangent line at x = a. If has no tangent line at x = a. f(a + h) - f(a) lim is finite. h→0 h f(a + h) - f(a) lim h->0+ and lim h h->0- f(a + h) - f(a) h are infinite. lim does not exist. h→0 f(a+h) - f(a) h f'(a) is defined. f'(a) is undefined. If is differentiable at x = a. If is not differentiable at x = a.arrow_forwardThe graph below is the function f(z) 4 3 -2 -1 -1 1 2 3 -3 Consider the function f whose graph is given above. (A) Find the following. If a function value is undefined, enter "undefined". If a limit does not exist, enter "DNE". If a limit can be represented by -∞o or ∞o, then do so. lim f(z) +3 lim f(z) 1-1 lim f(z) f(1) = 2 = -4 = undefined lim f(z) 1 2-1 lim f(z): 2-1+ lim f(x) 2+1 -00 = -2 = DNE f(-1) = -2 lim f(z) = -2 1-4 lim f(z) 2-4° 00 f'(0) f'(2) = = (B) List the value(s) of x for which f(x) is discontinuous. Then list the value(s) of x for which f(x) is left- continuous or right-continuous. Enter your answer as a comma-separated list, if needed (eg. -2, 3, 5). If there are none, enter "none". Discontinuous at z = Left-continuous at x = Invalid use of a comma.syntax incomplete. Right-continuous at z = Invalid use of a comma.syntax incomplete. (C) List the value(s) of x for which f(x) is non-differentiable. Enter your answer as a comma-separated list, if needed (eg. -2, 3, 5).…arrow_forward
- A graph of the function f is given below: Study the graph of f at the value given below. Select each of the following that applies for the value a = -4. f is defined at = a. f is not defined at 2 = a. If is continuous at x = a. Of is discontinuous at x = a. Of is smooth at x = a. f is not smooth at x = a. If has a horizontal tangent line at x = a. f has a vertical tangent line at x = a. Of has a oblique/slanted tangent line at x = a. Of has no tangent line at x = a. f(a + h) − f(a) h lim is finite. h→0 f(a + h) - f(a) lim is infinite. h→0 h f(a + h) - f(a) lim does not exist. h→0 h f'(a) is defined. f'(a) is undefined. If is differentiable at x = a. If is not differentiable at x = a.arrow_forwardFind the point of diminishing returns (x,y) for the function R(X), where R(x) represents revenue (in thousands of dollars) and x represents the amount spent on advertising (in thousands of dollars). R(x) = 10,000-x3 + 42x² + 700x, 0≤x≤20arrow_forward[3] Use a substitution to rewrite sn(x) as 8n(x) = 1 2π C sin 2n+1 sin f(x+u)du.arrow_forward
- Differentiate the following functions. (a) y(x) = x³+6x² -3x+1 (b) f(x)=5x-3x (c) h(x) = sin(2x2)arrow_forwardx-4 For the function f(x): find f'(x), the third derivative of f, and f(4) (x), the fourth derivative of f. x+7arrow_forwardIn x For the function f(x) = find f'(x). Then find f''(0) and f''(9). 11x'arrow_forward
 Algebra & Trigonometry with Analytic GeometryAlgebraISBN:9781133382119Author:SwokowskiPublisher:Cengage
Algebra & Trigonometry with Analytic GeometryAlgebraISBN:9781133382119Author:SwokowskiPublisher:Cengage