
Videos
(a)
The resultant force.
(a)
Answer to Problem 3.140P
The resultant force is
Explanation of Solution
The diagram for the force-couple system is given below:
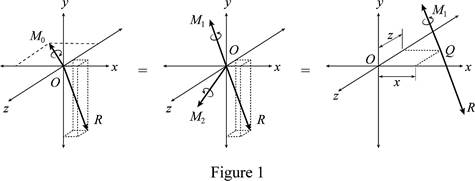
Refer fig 1.
Write the equation of resultant force.
Here, the resultant force is
Conclusion:
Substitute,
The magnitude of the resultant force,
Thus, the resultant force is
(b)
The pitch of the wrench.
(b)
Answer to Problem 3.140P
The pitch of the wrench is
Explanation of Solution
Write the equation of pitch of the wrench.
Here, the pitch of the wrench is
Since, the
Here, the constant is
Write the expression for the constant is,
Write the equation of momentum.
Here, the momentum is
Rewrite the expression for the momentum of the wrench is,
Conclusion:
Substitute,
Substitute,
Thus, the pitch of the wrench is
(c)
The point at which the axis of wrench intersects the xz-plane.
(c)
Answer to Problem 3.140P
The axis of wrench intersects the xz-plane at
Explanation of Solution
Refer fig 1,
Write the equation for the force couple system for the wrench.
Here, the momentum is
Write the expression for the momentum at which the wrench intersects the xz-plane.
Here, the position vector is
Write the expression for the position vector is,
Here, the coordinates are
Conclusion:
Substitute,
Substitute,
Substitute,
Comparing the coefficients of the x and z components both sides,
Therefore, he axis of wrench intersects the xz-plane at
Want to see more full solutions like this?
Chapter 3 Solutions
Vector Mechanics for Engineers: Statics and Dynamics


- **Problem 8-45.** The man has a mass of 60 kg and the crate has a mass of 100 kg. If the coefficient of static friction between his shoes and the ground is \( \mu_s = 0.4 \) and between the crate and the ground is \( \mu_c = 0.3 \), determine if the man is able to move the crate using the rope-and-pulley system shown. **Diagram Explanation:** The diagram illustrates a scenario where a man is attempting to pull a crate using a rope-and-pulley system. The setup is as follows: - **Crate (C):** Positioned on the ground with a rope attached. - **Rope:** Connects the crate to a pulley system and extends to the man. - **Pulley on Tree:** The rope runs over a pulley mounted on a tree which redirects the rope. - **Angles:** - The rope between the crate and tree forms a \(30^\circ\) angle with the horizontal. - The rope between the tree and the man makes a \(45^\circ\) angle with the horizontal. - **Man (A):** Pulling on the rope with the intention of moving the crate. This arrangement tests the…arrow_forwardplease solve this problems follow what the question are asking to do please show me step by steparrow_forwardplease first write the line action find the forces and them solve the problem step by steparrow_forward
- please solve this problem what the problem are asking to solve please explain step by step and give me the correct answerarrow_forwardplease help me to solve this problem step by steparrow_forwardplease help me to solve this problem and determine the stress for each point i like to be explained step by step with the correct answerarrow_forward
- please solve this problem for me the best way that you can explained to solve please show me the step how to solvearrow_forwardplese solbe this problem and give the correct answer solve step by step find the forces and line actionarrow_forwardplease help me to solve this problems first write the line of action and them find the forces {fx=0: fy=0: mz=0: and them draw the shear and bending moment diagram. please explain step by steparrow_forward
- please solve this problem step by step like human and give correct answer step by steparrow_forwardPROBLEM 11: Determine the force, P, that must be exerted on the handles of the bolt cutter. (A) 7.5 N (B) 30.0 N (C) 52.5 N (D) 300 N (E) 325 N .B X 3 cm E 40 cm cm F = 1000 N 10 cm 3 cm boltarrow_forwardUsing the moment-area theorems, determine a) the rotation at A, b) the deflection at L/2, c) the deflection at L/4. (Hint: Use symmetry for Part a (θA= - θB, or θC=0), Use the rotation at A for Parts b and c. Note that all deformations in the scope of our topics are small deformation and for small θ, sinθ=θ).arrow_forward
 International Edition---engineering Mechanics: St...Mechanical EngineeringISBN:9781305501607Author:Andrew Pytel And Jaan KiusalaasPublisher:CENGAGE L
International Edition---engineering Mechanics: St...Mechanical EngineeringISBN:9781305501607Author:Andrew Pytel And Jaan KiusalaasPublisher:CENGAGE L