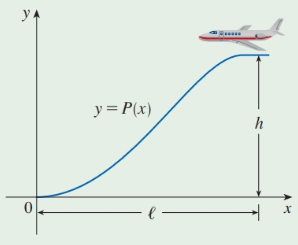
An approach path for an aircraft landing is shown in the figure and satisfies the following conditions: (i) The cruising altitude is h when descent starts at a horizontal distance l from touchdown at the origin. (ii) The pilot must maintain a constant horizontal speed v throughout descent. (iii) The absolute value of the vertical acceleration should not exceed a constant k (which is much less than the acceleration due to gravity). 1. Find a cubic polynomial P ( x ) = a x 3 + b x 2 + c x + d that satisfies condition (i) by imposing suitable conditions on P ( x ) and P ′ ( x ) at the start of descent and at touchdown.
An approach path for an aircraft landing is shown in the figure and satisfies the following conditions: (i) The cruising altitude is h when descent starts at a horizontal distance l from touchdown at the origin. (ii) The pilot must maintain a constant horizontal speed v throughout descent. (iii) The absolute value of the vertical acceleration should not exceed a constant k (which is much less than the acceleration due to gravity). 1. Find a cubic polynomial P ( x ) = a x 3 + b x 2 + c x + d that satisfies condition (i) by imposing suitable conditions on P ( x ) and P ′ ( x ) at the start of descent and at touchdown.
Solution Summary: The author analyzes the cubic polynomial P(x)-2hl3x
An approach path for an aircraft landing is shown in the figure and satisfies the following conditions:
(i) The cruising altitude is
h
when descent starts at a horizontal distance
l
from touchdown at the origin.
(ii) The pilot must maintain a constant horizontal speed
v
throughout descent.
(iii) The absolute value of the vertical acceleration should not exceed a constant
k
(which is much less than the acceleration due to gravity).
1. Find a cubic polynomial
P
(
x
)
=
a
x
3
+
b
x
2
+
c
x
+
d
that satisfies condition (i) by imposing suitable conditions on
P
(
x
)
and
P
′
(
x
)
at the start of descent and at touchdown.
Explain the key points and reasons for 12.8.2 (1) and 12.8.2 (2)
Q1:
A slider in a machine moves along a fixed straight rod. Its
distance x cm along the rod is given below for various values of the time. Find the
velocity and acceleration of the slider when t = 0.3 seconds.
t(seconds)
x(cm)
0 0.1 0.2 0.3 0.4 0.5 0.6
30.13 31.62 32.87 33.64 33.95 33.81 33.24
Q2:
Using the Runge-Kutta method of fourth order, solve for y atr = 1.2,
From
dy_2xy +et
=
dx x²+xc*
Take h=0.2.
given x = 1, y = 0
Q3:Approximate the solution of the following equation
using finite difference method.
ly -(1-y=
y = x), y(1) = 2 and y(3) = −1
On the interval (1≤x≤3).(taking h=0.5).
Consider the function f(x) = x²-1.
(a) Find the instantaneous rate of change of f(x) at x=1 using the definition of the derivative.
Show all your steps clearly.
(b) Sketch the graph of f(x) around x = 1. Draw the secant line passing through the points on the
graph where x 1 and x->
1+h (for a small positive value of h, illustrate conceptually). Then,
draw the tangent line to the graph at x=1. Explain how the slope of the tangent line relates to the
value you found in part (a).
(c) In a few sentences, explain what the instantaneous rate of change of f(x) at x = 1 represents in
the context of the graph of f(x). How does the rate of change of this function vary at different
points?
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, calculus and related others by exploring similar questions and additional content below.




 Trigonometry (MindTap Course List)TrigonometryISBN:9781337278461Author:Ron LarsonPublisher:Cengage Learning
Trigonometry (MindTap Course List)TrigonometryISBN:9781337278461Author:Ron LarsonPublisher:Cengage Learning Algebra & Trigonometry with Analytic GeometryAlgebraISBN:9781133382119Author:SwokowskiPublisher:Cengage
Algebra & Trigonometry with Analytic GeometryAlgebraISBN:9781133382119Author:SwokowskiPublisher:Cengage College Algebra (MindTap Course List)AlgebraISBN:9781305652231Author:R. David Gustafson, Jeff HughesPublisher:Cengage Learning
College Algebra (MindTap Course List)AlgebraISBN:9781305652231Author:R. David Gustafson, Jeff HughesPublisher:Cengage Learning Glencoe Algebra 1, Student Edition, 9780079039897...AlgebraISBN:9780079039897Author:CarterPublisher:McGraw Hill
Glencoe Algebra 1, Student Edition, 9780079039897...AlgebraISBN:9780079039897Author:CarterPublisher:McGraw Hill Algebra and Trigonometry (MindTap Course List)AlgebraISBN:9781305071742Author:James Stewart, Lothar Redlin, Saleem WatsonPublisher:Cengage Learning
Algebra and Trigonometry (MindTap Course List)AlgebraISBN:9781305071742Author:James Stewart, Lothar Redlin, Saleem WatsonPublisher:Cengage Learning