Figure 2.73 Industrial pipe installations often feature pipes running in different directions. How can we find the distance between two skew pipes? Finding the distance from a point to a line or from a line to a plane seems like a pretty abstract procedure. But, if the lines represent pipes in a chemical plant or tubes in an oil refinery or roads at an intersection of highways, confirming that the distance between them meets specifications can be both important and awkward to measure. One way is to model the two pipes as lines, using the techniques in this Chapter, and then calculate the distance between them. The calculation involves forming vectors along the directions of the lines and using both the cross product and the dot product. The symmetric forms of two lines, L 1 and L 2 , are L 1 : x − x 1 a 1 = y − y 1 b 1 = z − z 1 c 1 L 2 : x − x 2 a 2 = y − y 2 b 2 = z − z 2 c 2 You are to develop a formula for the distance d between these two lines, in terms of the values a 1 , b 1 , c 1 ; b 2 , c 2 ; x 1 , y 1 , z 1 ; and x 2 , y 2 , z 2 . The distance between two lines is usually taken to mean the minimum distance, so this is the length of a line segment or the length of a vector that is perpendicular to both lines and intersects both lines. 3. From vector N , form a unit vector n in the same direction.
Figure 2.73 Industrial pipe installations often feature pipes running in different directions. How can we find the distance between two skew pipes? Finding the distance from a point to a line or from a line to a plane seems like a pretty abstract procedure. But, if the lines represent pipes in a chemical plant or tubes in an oil refinery or roads at an intersection of highways, confirming that the distance between them meets specifications can be both important and awkward to measure. One way is to model the two pipes as lines, using the techniques in this Chapter, and then calculate the distance between them. The calculation involves forming vectors along the directions of the lines and using both the cross product and the dot product. The symmetric forms of two lines, L 1 and L 2 , are L 1 : x − x 1 a 1 = y − y 1 b 1 = z − z 1 c 1 L 2 : x − x 2 a 2 = y − y 2 b 2 = z − z 2 c 2 You are to develop a formula for the distance d between these two lines, in terms of the values a 1 , b 1 , c 1 ; b 2 , c 2 ; x 1 , y 1 , z 1 ; and x 2 , y 2 , z 2 . The distance between two lines is usually taken to mean the minimum distance, so this is the length of a line segment or the length of a vector that is perpendicular to both lines and intersects both lines. 3. From vector N , form a unit vector n in the same direction.
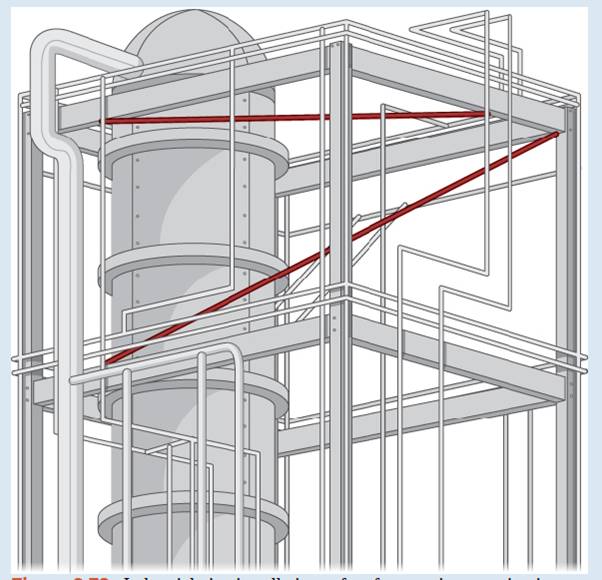
Figure 2.73 Industrial pipe installations often feature pipes running in different directions. How can we find the distance between two skew pipes?
Finding the distance from a point to a line or from a line to a plane seems like a pretty abstract procedure. But, if the lines represent pipes in a chemical plant or tubes in an oil refinery or roads at an intersection of highways, confirming that the distance between them meets specifications can be both important and awkward to measure. One way is to model the two pipes as lines, using the techniques in this Chapter, and then calculate the distance between them. The calculation involves forming vectors along the directions of the lines and using both the cross product and the dot
product.
The symmetric forms of two lines,
L
1
and
L
2
,
are
L
1
:
x
−
x
1
a
1
=
y
−
y
1
b
1
=
z
−
z
1
c
1
L
2
:
x
−
x
2
a
2
=
y
−
y
2
b
2
=
z
−
z
2
c
2
You are to develop a formula for the distance
d
between these two lines, in terms of the values
a
1
,
b
1
,
c
1
;
b
2
,
c
2
;
x
1
,
y
1
,
z
1
;
and
x
2
,
y
2
,
z
2
.
The distance between two lines is usually taken to mean the
minimum distance, so this is the length of a line segment or the length of a vector that is perpendicular to both lines and intersects both lines.
3. From vector
N
,
form a unit vector
n
in the same direction.
Quantities that have magnitude and direction but not position. Some examples of vectors are velocity, displacement, acceleration, and force. They are sometimes called Euclidean or spatial vectors.
1 The ratio of Argan to Potassium from
a sample found
sample found in Canada is .195
Find The estimated age of the sample
A
In (1+8.33 (+))
t = (1-26 × 109) en (1
In a
7. Find the doubling time of an investment earning 2.5% interest compounded
a) semiannually
b) continuously
6. Find the time it will take $1000 to grow to $5000 at an interest rate of 3.5% if the interest is
compounded
a) quarterly
b) continuously
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, subject and related others by exploring similar questions and additional content below.




 Holt Mcdougal Larson Pre-algebra: Student Edition...AlgebraISBN:9780547587776Author:HOLT MCDOUGALPublisher:HOLT MCDOUGAL
Holt Mcdougal Larson Pre-algebra: Student Edition...AlgebraISBN:9780547587776Author:HOLT MCDOUGALPublisher:HOLT MCDOUGAL Glencoe Algebra 1, Student Edition, 9780079039897...AlgebraISBN:9780079039897Author:CarterPublisher:McGraw Hill
Glencoe Algebra 1, Student Edition, 9780079039897...AlgebraISBN:9780079039897Author:CarterPublisher:McGraw Hill Elementary AlgebraAlgebraISBN:9780998625713Author:Lynn Marecek, MaryAnne Anthony-SmithPublisher:OpenStax - Rice University
Elementary AlgebraAlgebraISBN:9780998625713Author:Lynn Marecek, MaryAnne Anthony-SmithPublisher:OpenStax - Rice University
 Algebra: Structure And Method, Book 1AlgebraISBN:9780395977224Author:Richard G. Brown, Mary P. Dolciani, Robert H. Sorgenfrey, William L. ColePublisher:McDougal Littell
Algebra: Structure And Method, Book 1AlgebraISBN:9780395977224Author:Richard G. Brown, Mary P. Dolciani, Robert H. Sorgenfrey, William L. ColePublisher:McDougal Littell College AlgebraAlgebraISBN:9781305115545Author:James Stewart, Lothar Redlin, Saleem WatsonPublisher:Cengage Learning
College AlgebraAlgebraISBN:9781305115545Author:James Stewart, Lothar Redlin, Saleem WatsonPublisher:Cengage Learning