Y= 50) + 5-106214) Y=2.51 in Eicure Pa.27 A two-link planar robot for problem Pa-27. 3-39. To find the height of a building, a surveyor measures the angle of the building from two different points A and B as shown in Fix F3.39. The distance between the two points is to m. Find the bright h of the building. 000 40° A 10 m Eigure P3.39 Survey set up to find the height of a building. B 60° 100 000 h
Y= 50) + 5-106214) Y=2.51 in Eicure Pa.27 A two-link planar robot for problem Pa-27. 3-39. To find the height of a building, a surveyor measures the angle of the building from two different points A and B as shown in Fix F3.39. The distance between the two points is to m. Find the bright h of the building. 000 40° A 10 m Eigure P3.39 Survey set up to find the height of a building. B 60° 100 000 h
Trigonometry (11th Edition)
11th Edition
ISBN:9780134217437
Author:Margaret L. Lial, John Hornsby, David I. Schneider, Callie Daniels
Publisher:Margaret L. Lial, John Hornsby, David I. Schneider, Callie Daniels
Chapter1: Trigonometric Functions
Section: Chapter Questions
Problem 1RE:
1. Give the measures of the complement and the supplement of an angle measuring 35°.

Related questions
Question
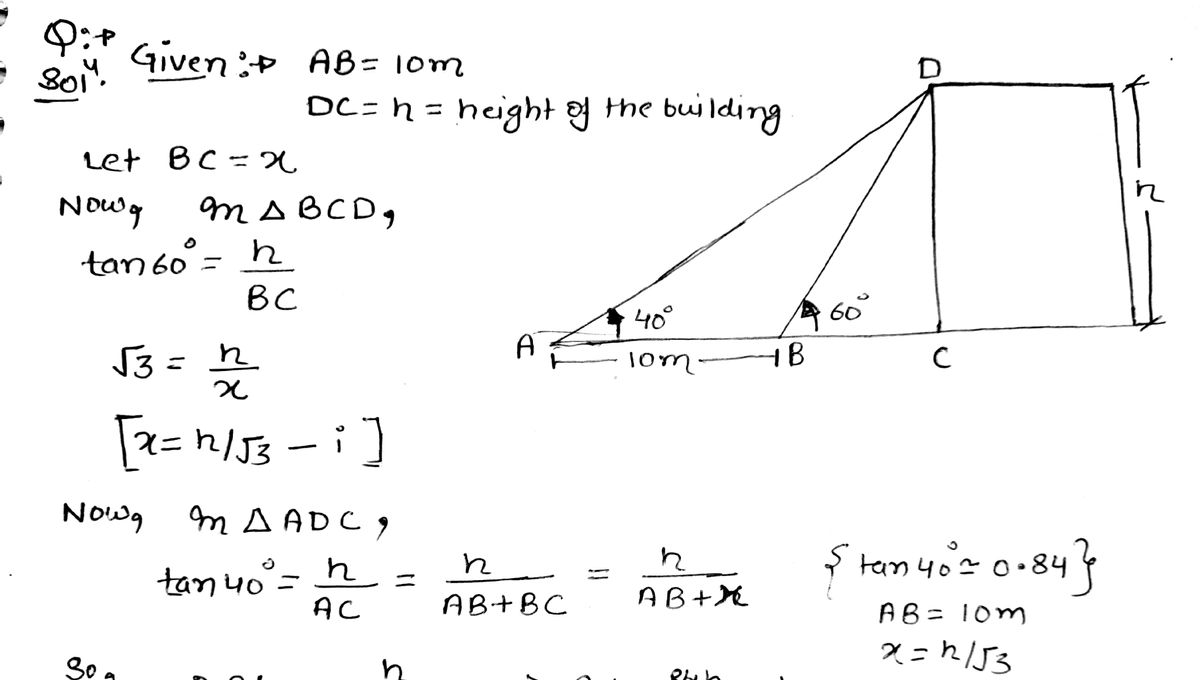
please help with 3-39! thanks

Transcribed Image Text:-lp
0
es in Engine...
quations
uadratics
in Engine...
7 +5
.
+++++
Shapes
y, in.
A
H
O
5
A
Figure P3.39 Survey set up to find the height of a building.
Figure P3.26 A two-link planar robot for problem P3-26.
3-27. Consider a two-link planar robot, with positive orientations of e, and e, as shown in Fig.F3.18.
a. Suppose , --100°, 6, -210, I, -5 in, and I, - 10 in. Sketch the orientation of the robot in the x-y plane, and determine the x-y coordinates of point P
b. Suppose now that the same robot has its tip located in the first quadrant and is oriented in the "elbow-up" position, as shown in F3.27. If the tip of the robot is located at point Px, y)-(12. a) In..
determine the values of 6, and ₂.
P(12, 2)
0₁
▶40°
OneNote for Windows 10
Ink to Shape
10 m B
O
10
02
Ga Ink to Text
60°
0₁
x= 5 cas(-100) + 10 cos(-100 210)
X=-5.68 in
y=5(100) +5 sm (-100+210)
Y=2.51 in
Eigure Pa.27 A two-link planar robot for problem P3:27.
3-39. To find the height of a building, a surveyor measures the angle of the building from two different points A and B as shown in Fig.P3.39. The distance between the two points is 10 m. Find the height
h of the building.
H
O
10
◆x, in.
Ruler
000
00
Math
h
-x, in.
H
N
Expert Solution
Step 1

Step by step
Solved in 2 steps with 2 images

Recommended textbooks for you
Trigonometry (11th Edition)
Trigonometry
ISBN:
9780134217437
Author:
Margaret L. Lial, John Hornsby, David I. Schneider, Callie Daniels
Publisher:
PEARSON

Trigonometry (MindTap Course List)
Trigonometry
ISBN:
9781305652224
Author:
Charles P. McKeague, Mark D. Turner
Publisher:
Cengage Learning
Trigonometry (11th Edition)
Trigonometry
ISBN:
9780134217437
Author:
Margaret L. Lial, John Hornsby, David I. Schneider, Callie Daniels
Publisher:
PEARSON
Trigonometry (MindTap Course List)
Trigonometry
ISBN:
9781305652224
Author:
Charles P. McKeague, Mark D. Turner
Publisher:
Cengage Learning

Trigonometry (MindTap Course List)
Trigonometry
ISBN:
9781337278461
Author:
Ron Larson
Publisher:
Cengage Learning