Many aspects of a gymnast's motion can be modeled by representing the gymnast by four segments consisting of arms, torso (including the head), thighs, and lower legs, as in the figure below. 60° Thigh Ex Arm 60° Torso Leg x In the figure, (b) shows arrows of lengths rcg locating the center of gravity of each segment. Use the data below and the coordinate system shown in figure (b) to locate the center of gravity of the gymnast shown in figure (a). Masses for the arms, thighs, and legs include both appendages. (Enter your answers in m, to at least three significant figures.)
Many aspects of a gymnast's motion can be modeled by representing the gymnast by four segments consisting of arms, torso (including the head), thighs, and lower legs, as in the figure below. 60° Thigh Ex Arm 60° Torso Leg x In the figure, (b) shows arrows of lengths rcg locating the center of gravity of each segment. Use the data below and the coordinate system shown in figure (b) to locate the center of gravity of the gymnast shown in figure (a). Masses for the arms, thighs, and legs include both appendages. (Enter your answers in m, to at least three significant figures.)

Elements Of Electromagnetics
7th Edition
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Sadiku, Matthew N. O.
ChapterMA: Math Assessment
Section: Chapter Questions
Problem 1.1MA

Related questions

Question
See image that is attached. Thank you.

Transcribed Image Text:### Modeling a Gymnast's Motion
Many aspects of a gymnast's motion can be effectively modeled by representing the gymnast using four segments: the arms, torso (including the head), thighs, and lower legs. This is illustrated in the figures below.
#### Figure Descriptions:
- **Figure (a):** Illustrates a gymnast in a specified pose with legs raised, forming an angle of 60° from the horizontal.
- **Figure (b):** Displays a segmented model of the gymnast. Each segment (arm, leg, thigh, torso) is shown with arrows indicating the center of gravity (\( r_{cg} \)) of each segment within the coordinate system.
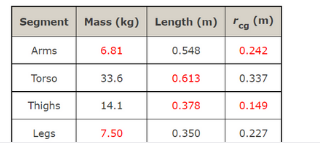
#### Table of Segment Data:
| Segment | Mass (kg) | Length (m) | \( r_{cg} \) (m) |
|---------|-----------|------------|------------------|
| Arms | 6.81 | 0.548 | 0.242 |
| Torso | 33.6 | 0.613 | 0.337 |
| Thighs | 14.1 | 0.378 | 0.149 |
| Legs | 7.50 | 0.350 | 0.227 |
#### Instructions:
- Use the data provided and the coordinate system shown in figure (b) to determine the center of gravity of the entire gymnast as shown in figure (a).
- The mass values for the arms, thighs, and legs include both appendages.
- Ensure that all answers are recorded in meters, with at least three significant figures.
This model aids in understanding how the distribution and alignment of body segments affect balance and movement during gymnastics.
Expert Solution
Step 1
Draw the given table.

Step by step
Solved in 2 steps with 1 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Recommended textbooks for you
Elements Of Electromagnetics
Mechanical Engineering
ISBN:
9780190698614
Author:
Sadiku, Matthew N. O.
Publisher:
Oxford University Press

Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:
9780134319650
Author:
Russell C. Hibbeler
Publisher:
PEARSON

Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:
9781259822674
Author:
Yunus A. Cengel Dr., Michael A. Boles
Publisher:
McGraw-Hill Education
Elements Of Electromagnetics
Mechanical Engineering
ISBN:
9780190698614
Author:
Sadiku, Matthew N. O.
Publisher:
Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:
9780134319650
Author:
Russell C. Hibbeler
Publisher:
PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:
9781259822674
Author:
Yunus A. Cengel Dr., Michael A. Boles
Publisher:
McGraw-Hill Education

Control Systems Engineering
Mechanical Engineering
ISBN:
9781118170519
Author:
Norman S. Nise
Publisher:
WILEY

Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:
9781337093347
Author:
Barry J. Goodno, James M. Gere
Publisher:
Cengage Learning

Engineering Mechanics: Statics
Mechanical Engineering
ISBN:
9781118807330
Author:
James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:
WILEY