Let T(-) be a linear invertible transformation mapping vectors in R³ to vectors in R³. The vectors e, are the canonical basis vectors in R³. Each of the items below provides input/output pairs for T(-). Use these to obtain the columns of A, the matrix representation of T(-). 1. 2. T(e₁) = 0 1 ())-() 4 T(0
Let T(-) be a linear invertible transformation mapping vectors in R³ to vectors in R³. The vectors e, are the canonical basis vectors in R³. Each of the items below provides input/output pairs for T(-). Use these to obtain the columns of A, the matrix representation of T(-). 1. 2. T(e₁) = 0 1 ())-() 4 T(0

Advanced Engineering Mathematics
10th Edition
ISBN:9780470458365
Author:Erwin Kreyszig
Publisher:Erwin Kreyszig
Chapter2: Second-order Linear Odes
Section: Chapter Questions
Problem 1RQ

Related questions
Question
Can The solver please include the hand written steps and all matrix notation possible? Thank you!
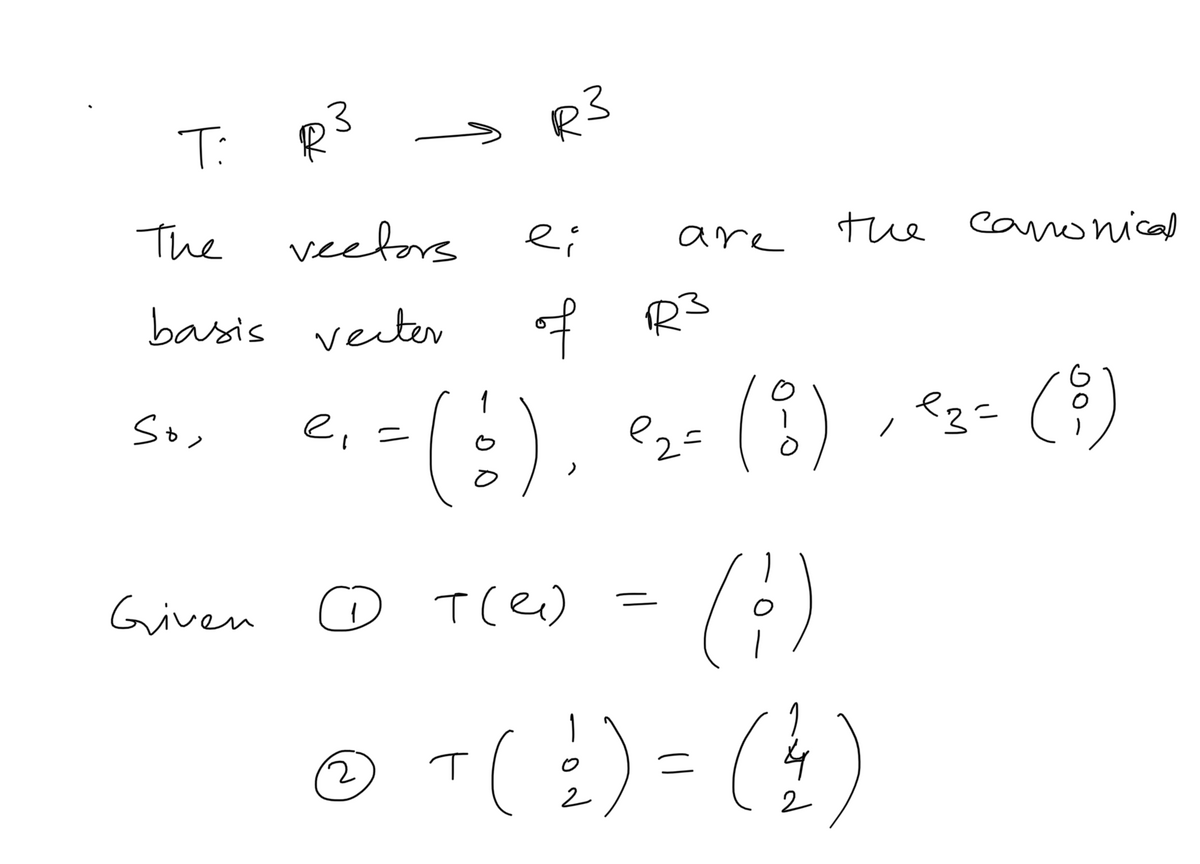
![Let \( T(\cdot) \) be a linear invertible transformation mapping vectors in \( \mathbb{R}^3 \) to vectors in \( \mathbb{R}^3 \). The vectors \( e_i \) are the canonical basis vectors in \( \mathbb{R}^3 \).
Each of the items below provides input/output pairs for \( T(\cdot) \). Use these to obtain the columns of \( A \), the matrix representation of \( T(\cdot) \).
1.
\[ T(e_1) = \begin{pmatrix} 1 \\ 0 \\ 1 \end{pmatrix} \]
2.
\[ T\begin{pmatrix} 1 \\ 0 \\ 2 \end{pmatrix} = \begin{pmatrix} 1 \\ 4 \\ 2 \end{pmatrix} \]](/v2/_next/image?url=https%3A%2F%2Fcontent.bartleby.com%2Fqna-images%2Fquestion%2F5e343f85-ac09-4dac-ae1f-fa90b444949b%2F83996d3f-83a1-436e-addb-b03fbbfcfff2%2Fu2i6dji_processed.jpeg&w=3840&q=75)
Transcribed Image Text:Let \( T(\cdot) \) be a linear invertible transformation mapping vectors in \( \mathbb{R}^3 \) to vectors in \( \mathbb{R}^3 \). The vectors \( e_i \) are the canonical basis vectors in \( \mathbb{R}^3 \).
Each of the items below provides input/output pairs for \( T(\cdot) \). Use these to obtain the columns of \( A \), the matrix representation of \( T(\cdot) \).
1.
\[ T(e_1) = \begin{pmatrix} 1 \\ 0 \\ 1 \end{pmatrix} \]
2.
\[ T\begin{pmatrix} 1 \\ 0 \\ 2 \end{pmatrix} = \begin{pmatrix} 1 \\ 4 \\ 2 \end{pmatrix} \]
Expert Solution
Step 1

Step by step
Solved in 2 steps with 2 images

Recommended textbooks for you
Advanced Engineering Mathematics
Advanced Math
ISBN:
9780470458365
Author:
Erwin Kreyszig
Publisher:
Wiley, John & Sons, Incorporated

Numerical Methods for Engineers
Advanced Math
ISBN:
9780073397924
Author:
Steven C. Chapra Dr., Raymond P. Canale
Publisher:
McGraw-Hill Education

Introductory Mathematics for Engineering Applicat…
Advanced Math
ISBN:
9781118141809
Author:
Nathan Klingbeil
Publisher:
WILEY
Advanced Engineering Mathematics
Advanced Math
ISBN:
9780470458365
Author:
Erwin Kreyszig
Publisher:
Wiley, John & Sons, Incorporated
Numerical Methods for Engineers
Advanced Math
ISBN:
9780073397924
Author:
Steven C. Chapra Dr., Raymond P. Canale
Publisher:
McGraw-Hill Education
Introductory Mathematics for Engineering Applicat…
Advanced Math
ISBN:
9781118141809
Author:
Nathan Klingbeil
Publisher:
WILEY

Mathematics For Machine Technology
Advanced Math
ISBN:
9781337798310
Author:
Peterson, John.
Publisher:
Cengage Learning,

