e. The solution solution set of Ax = 0. 25. Prove the second part of Theorem 6: Let w be any solution of Axb, and define v, w -- p. Show that v, is a solution of Ax 0. This shows that every solution of Axb has the form wa p + V. with p a particular solution of Ax= b and vi, a solution of Ax = 0. 26. Suppose Axb has a solution. Explain why the solution is han anly the trivial solution.
e. The solution solution set of Ax = 0. 25. Prove the second part of Theorem 6: Let w be any solution of Axb, and define v, w -- p. Show that v, is a solution of Ax 0. This shows that every solution of Axb has the form wa p + V. with p a particular solution of Ax= b and vi, a solution of Ax = 0. 26. Suppose Axb has a solution. Explain why the solution is han anly the trivial solution.

Advanced Engineering Mathematics
10th Edition
ISBN:9780470458365
Author:Erwin Kreyszig
Publisher:Erwin Kreyszig
Chapter2: Second-order Linear Odes
Section: Chapter Questions
Problem 1RQ

Related questions
Question
25
![c. The solution set of Axb is obtained by translating the
solution set of Ax = 0,
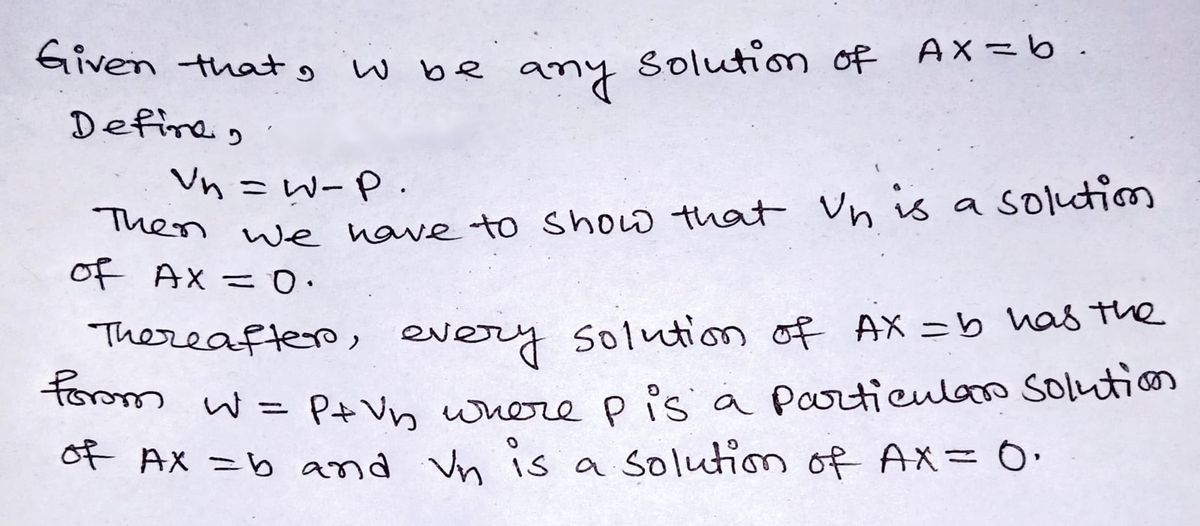
25. Prove the second part of Theorem 6: Let w be any solution of
Axb, and define vw-p. Show that v, is a solution
of Ax 0. This shows that every solution of Axb has the
form w p + V. with p a particular solution of Ax = band
Vh a solution of Ax = 0.
26. Suppose Ax=b has a solution. Explain why the solution is
unique precisely when Ax 0 has only the trivial solution.
27. Suppose A is the 3 x 3 zero matrix (with all zero entries).
Describe the solution set of the equation Ax = 0.
28. If b 0, can the solution set of Axb be a plane through
the origin? Explain.
In Exercises 29-32,, (a) does the equation Ax=0 have a nontriv-
ial solution and (b) does the equation Ax = b have at least one
solution for every possible b?
29. A is a 3 x 3 matrix with three pivot positions.
30. A is a 3 x 3 matrix with two pivot positions.
31. A is a 3 x 2 matrix with two pivot positions.
32. A is a 2 x 4 matrix with two pivot positions.
-2 -6
7 21
-3 -9
33. Given A =
find one nontrivial solution of
Ax = 0 by inspection. [Hint: Think of the equation Ax = 0
written as a vector equation.]
RIN
34, Given AS
1
2
4 -5
-1 8
1.5 Solution Sets of Linear Systems to
6
Ax = 0 by inspection.
35. Construct a 3x3 nonzero mara A such that the vesker
0
36. Construct a 3 x 3 monzere matrix A us that the vezzOT
12
X3
is a solution of Ax = 0,
1
37. Construct a 2 x 2 matrix A such that the option set of he
equation Az = 0) is the fine in R² through (4.1) and the
origin. Then, find a vector b in R² such that the solution set
of Ax=b is not a line in 22 parallel to the solution set of
Ax = 0. Why does this not contradict Theorems 6?
SOLUTIONS TO PRACTICE PROBLEMS
1. Row reduce the augmented matrix:
0
9]-[8
And one now ation of
is a solution of Ax = 0.
38. Suppose A is a 3 x 3 matrix and y is a vector in ³ such that
the equation Ax = y does not have a solution. Does there
exist a vector z in R' such that the equation Ax = za a
unique solution? Discuss.
=
39. Let A be an m x matrix and let u be a vector in asas-
fies the equation Ax = 0. Show that for any scalare, the wec-
tor cu also satisfies Ax = 0. [That is, show that A(cu) = 0.1
40. Let A be an m x n matrix, and let u and y be vectors in Rº
with the property that Au = 0 and Av = 0. Explain why
A(u + v) most be the zero vector. Then explain why
A(cu + dv) = 0 for each pair of scalars c and d.
4
-5 0
18
0-9
Thus x₁ = 4-3x3, x₂ = −1+2x3, with x3 free. The general solution in parametric
x2
vector form is
4 - 3x3
-1 + 2x3
X3
0 3 4
9]-[14]
1 -2 -1
+ 3x3 = 4
X2 - 2x3 = -1
=
4
2
[]+[]
x3
0
4
P
The intersection of the two planes is the line through p in the direction of v.](/v2/_next/image?url=https%3A%2F%2Fcontent.bartleby.com%2Fqna-images%2Fquestion%2Fad669a50-5f0c-4df5-9260-23ad3558d216%2F7d217c93-e96a-4cb6-8b69-d3e30c86950d%2Ftszxlz_processed.jpeg&w=3840&q=75)
Transcribed Image Text:c. The solution set of Axb is obtained by translating the
solution set of Ax = 0,
25. Prove the second part of Theorem 6: Let w be any solution of
Axb, and define vw-p. Show that v, is a solution
of Ax 0. This shows that every solution of Axb has the
form w p + V. with p a particular solution of Ax = band
Vh a solution of Ax = 0.
26. Suppose Ax=b has a solution. Explain why the solution is
unique precisely when Ax 0 has only the trivial solution.
27. Suppose A is the 3 x 3 zero matrix (with all zero entries).
Describe the solution set of the equation Ax = 0.
28. If b 0, can the solution set of Axb be a plane through
the origin? Explain.
In Exercises 29-32,, (a) does the equation Ax=0 have a nontriv-
ial solution and (b) does the equation Ax = b have at least one
solution for every possible b?
29. A is a 3 x 3 matrix with three pivot positions.
30. A is a 3 x 3 matrix with two pivot positions.
31. A is a 3 x 2 matrix with two pivot positions.
32. A is a 2 x 4 matrix with two pivot positions.
-2 -6
7 21
-3 -9
33. Given A =
find one nontrivial solution of
Ax = 0 by inspection. [Hint: Think of the equation Ax = 0
written as a vector equation.]
RIN
34, Given AS
1
2
4 -5
-1 8
1.5 Solution Sets of Linear Systems to
6
Ax = 0 by inspection.
35. Construct a 3x3 nonzero mara A such that the vesker
0
36. Construct a 3 x 3 monzere matrix A us that the vezzOT
12
X3
is a solution of Ax = 0,
1
37. Construct a 2 x 2 matrix A such that the option set of he
equation Az = 0) is the fine in R² through (4.1) and the
origin. Then, find a vector b in R² such that the solution set
of Ax=b is not a line in 22 parallel to the solution set of
Ax = 0. Why does this not contradict Theorems 6?
SOLUTIONS TO PRACTICE PROBLEMS
1. Row reduce the augmented matrix:
0
9]-[8
And one now ation of
is a solution of Ax = 0.
38. Suppose A is a 3 x 3 matrix and y is a vector in ³ such that
the equation Ax = y does not have a solution. Does there
exist a vector z in R' such that the equation Ax = za a
unique solution? Discuss.
=
39. Let A be an m x matrix and let u be a vector in asas-
fies the equation Ax = 0. Show that for any scalare, the wec-
tor cu also satisfies Ax = 0. [That is, show that A(cu) = 0.1
40. Let A be an m x n matrix, and let u and y be vectors in Rº
with the property that Au = 0 and Av = 0. Explain why
A(u + v) most be the zero vector. Then explain why
A(cu + dv) = 0 for each pair of scalars c and d.
4
-5 0
18
0-9
Thus x₁ = 4-3x3, x₂ = −1+2x3, with x3 free. The general solution in parametric
x2
vector form is
4 - 3x3
-1 + 2x3
X3
0 3 4
9]-[14]
1 -2 -1
+ 3x3 = 4
X2 - 2x3 = -1
=
4
2
[]+[]
x3
0
4
P
The intersection of the two planes is the line through p in the direction of v.
Expert Solution
Step 1

Step by step
Solved in 2 steps with 2 images

Recommended textbooks for you
Advanced Engineering Mathematics
Advanced Math
ISBN:
9780470458365
Author:
Erwin Kreyszig
Publisher:
Wiley, John & Sons, Incorporated

Numerical Methods for Engineers
Advanced Math
ISBN:
9780073397924
Author:
Steven C. Chapra Dr., Raymond P. Canale
Publisher:
McGraw-Hill Education

Introductory Mathematics for Engineering Applicat…
Advanced Math
ISBN:
9781118141809
Author:
Nathan Klingbeil
Publisher:
WILEY
Advanced Engineering Mathematics
Advanced Math
ISBN:
9780470458365
Author:
Erwin Kreyszig
Publisher:
Wiley, John & Sons, Incorporated
Numerical Methods for Engineers
Advanced Math
ISBN:
9780073397924
Author:
Steven C. Chapra Dr., Raymond P. Canale
Publisher:
McGraw-Hill Education
Introductory Mathematics for Engineering Applicat…
Advanced Math
ISBN:
9781118141809
Author:
Nathan Klingbeil
Publisher:
WILEY

Mathematics For Machine Technology
Advanced Math
ISBN:
9781337798310
Author:
Peterson, John.
Publisher:
Cengage Learning,

