Consider a satellite moving in a torque-free environment. The inertial frame and satellite body-fixed frame are represented by N-frame and B-frame, where {₁, 2, ñ3} and {b₁, 62, 63} are right-handed vector bases fixed in N-frame and B-frame, respectively. {b;} is aligned with the principal axis of inertia, where ₁ and 63 are associated with the minimum and maximum moments of inertia, respectively. Denote the satellite angular velocity by w = wibi; and the inertia tensor about the CoM by Ic. Suppose that I at time t = 0 is given by: Ic(t = 0) = 2ñ₁ñ₁ +2.25ñ₂ŵ₂ +2.25 3ñ3 -0.75 n₂n3 -0.75 n3n2 (dimensionless) (a): First, let us characterize the inertia property of the satellite from the given information. (a.1): Express the satellite inertia tensor about the CoM in B-frame. Sketch the inertia ellipsoid of this body with B-frame
Consider a satellite moving in a torque-free environment. The inertial frame and satellite body-fixed frame are represented by N-frame and B-frame, where {₁, 2, ñ3} and {b₁, 62, 63} are right-handed vector bases fixed in N-frame and B-frame, respectively. {b;} is aligned with the principal axis of inertia, where ₁ and 63 are associated with the minimum and maximum moments of inertia, respectively. Denote the satellite angular velocity by w = wibi; and the inertia tensor about the CoM by Ic. Suppose that I at time t = 0 is given by: Ic(t = 0) = 2ñ₁ñ₁ +2.25ñ₂ŵ₂ +2.25 3ñ3 -0.75 n₂n3 -0.75 n3n2 (dimensionless) (a): First, let us characterize the inertia property of the satellite from the given information. (a.1): Express the satellite inertia tensor about the CoM in B-frame. Sketch the inertia ellipsoid of this body with B-frame

Elements Of Electromagnetics
7th Edition
ISBN:9780190698614
Author:Sadiku, Matthew N. O.
Publisher:Sadiku, Matthew N. O.
ChapterMA: Math Assessment
Section: Chapter Questions
Problem 1.1MA

Related questions
Question
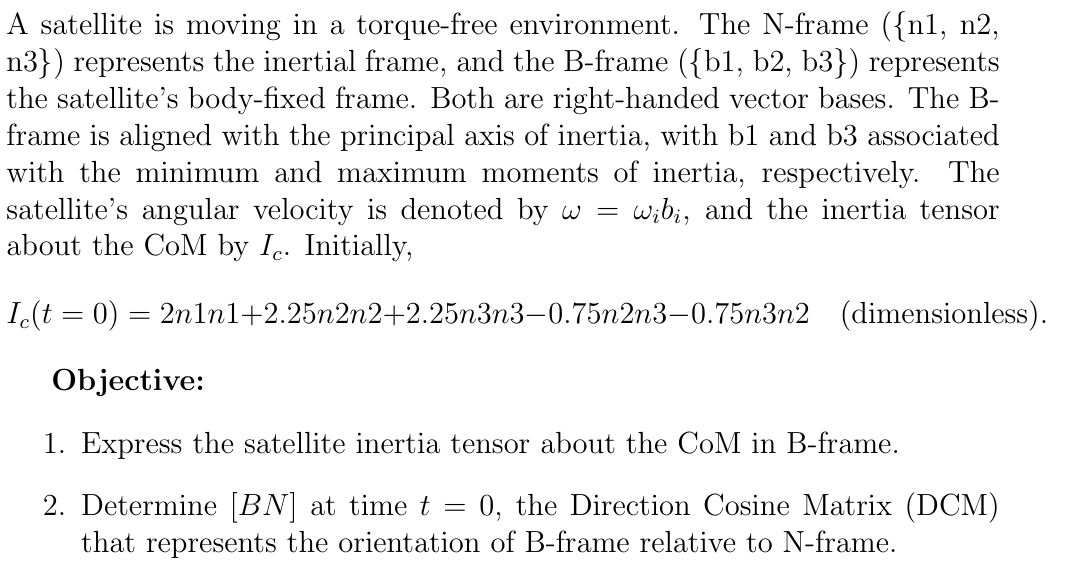
![Consider a satellite moving in a torque-free environment. The inertial frame and satellite body-fixed frame are represented by \( \mathcal{N}\)-frame and \( \mathcal{B}\)-frame, where \( \{\hat{n}_1, \hat{n}_2, \hat{n}_3\} \) and \( \{\hat{b}_1, \hat{b}_2, \hat{b}_3\} \) are right-handed vector bases fixed in \( \mathcal{N}\)-frame and \( \mathcal{B}\)-frame, respectively. \( \{\hat{b}_i\} \) is aligned with the principal axis of inertia, where \( \hat{b}_1 \) and \( \hat{b}_3 \) are associated with the minimum and maximum moments of inertia, respectively.
Denote the satellite angular velocity by \( \omega = \omega_i \hat{b}_i \) and the inertia tensor about the CoM by \( \bar{I}_c \). Suppose that \( \bar{I}_c \) at time \( t = 0 \) is given by:
\[
\bar{I}_c(t = 0) = 2 \hat{n}_1 \hat{n}_1 + 2.25 \hat{n}_2 \hat{n}_2 + 2.25 \hat{n}_3 \hat{n}_3 - 0.75 \hat{n}_2 \hat{n}_3 - 0.75 \hat{n}_3 \hat{n}_2 \quad \text{(dimensionless)}
\]
(a): First, let us characterize the inertia property of the satellite from the given information.
(a.1): **Express the satellite inertia tensor about the CoM in \( \mathcal{B}\)-frame. Sketch the inertia ellipsoid of this body with \( \mathcal{B}\)-frame.**](/v2/_next/image?url=https%3A%2F%2Fcontent.bartleby.com%2Fqna-images%2Fquestion%2Fad0d55fe-d83b-4711-86a1-cee8ecea510f%2F89fde7ca-dd30-4d61-985d-1b877eedb376%2Fxyiz49_processed.png&w=3840&q=75)
Transcribed Image Text:Consider a satellite moving in a torque-free environment. The inertial frame and satellite body-fixed frame are represented by \( \mathcal{N}\)-frame and \( \mathcal{B}\)-frame, where \( \{\hat{n}_1, \hat{n}_2, \hat{n}_3\} \) and \( \{\hat{b}_1, \hat{b}_2, \hat{b}_3\} \) are right-handed vector bases fixed in \( \mathcal{N}\)-frame and \( \mathcal{B}\)-frame, respectively. \( \{\hat{b}_i\} \) is aligned with the principal axis of inertia, where \( \hat{b}_1 \) and \( \hat{b}_3 \) are associated with the minimum and maximum moments of inertia, respectively.
Denote the satellite angular velocity by \( \omega = \omega_i \hat{b}_i \) and the inertia tensor about the CoM by \( \bar{I}_c \). Suppose that \( \bar{I}_c \) at time \( t = 0 \) is given by:
\[
\bar{I}_c(t = 0) = 2 \hat{n}_1 \hat{n}_1 + 2.25 \hat{n}_2 \hat{n}_2 + 2.25 \hat{n}_3 \hat{n}_3 - 0.75 \hat{n}_2 \hat{n}_3 - 0.75 \hat{n}_3 \hat{n}_2 \quad \text{(dimensionless)}
\]
(a): First, let us characterize the inertia property of the satellite from the given information.
(a.1): **Express the satellite inertia tensor about the CoM in \( \mathcal{B}\)-frame. Sketch the inertia ellipsoid of this body with \( \mathcal{B}\)-frame.**
Expert Solution
Step 1: Given data

Step by step
Solved in 3 steps with 8 images

Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Recommended textbooks for you
Elements Of Electromagnetics
Mechanical Engineering
ISBN:
9780190698614
Author:
Sadiku, Matthew N. O.
Publisher:
Oxford University Press

Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:
9780134319650
Author:
Russell C. Hibbeler
Publisher:
PEARSON

Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:
9781259822674
Author:
Yunus A. Cengel Dr., Michael A. Boles
Publisher:
McGraw-Hill Education
Elements Of Electromagnetics
Mechanical Engineering
ISBN:
9780190698614
Author:
Sadiku, Matthew N. O.
Publisher:
Oxford University Press
Mechanics of Materials (10th Edition)
Mechanical Engineering
ISBN:
9780134319650
Author:
Russell C. Hibbeler
Publisher:
PEARSON
Thermodynamics: An Engineering Approach
Mechanical Engineering
ISBN:
9781259822674
Author:
Yunus A. Cengel Dr., Michael A. Boles
Publisher:
McGraw-Hill Education

Control Systems Engineering
Mechanical Engineering
ISBN:
9781118170519
Author:
Norman S. Nise
Publisher:
WILEY

Mechanics of Materials (MindTap Course List)
Mechanical Engineering
ISBN:
9781337093347
Author:
Barry J. Goodno, James M. Gere
Publisher:
Cengage Learning

Engineering Mechanics: Statics
Mechanical Engineering
ISBN:
9781118807330
Author:
James L. Meriam, L. G. Kraige, J. N. Bolton
Publisher:
WILEY