A person’s arm rotates around the shoulder (S) and elbow (E) joint axes. The arm has the length a = 9 1/2", the forearm has the length b = 11". The shoulder joint angle is θ = 43°. The elbow joint angle is γ = 21°. a) Compute the Cartesian coordinates of the endpoint H by using a+b. b) Identify the origin of your reference frame.
A person’s arm rotates around the shoulder (S) and elbow (E) joint axes. The arm has the length a = 9 1/2", the forearm has the length b = 11". The shoulder joint angle is θ = 43°. The elbow joint angle is γ = 21°. a) Compute the Cartesian coordinates of the endpoint H by using a+b. b) Identify the origin of your reference frame.

Related questions
Question
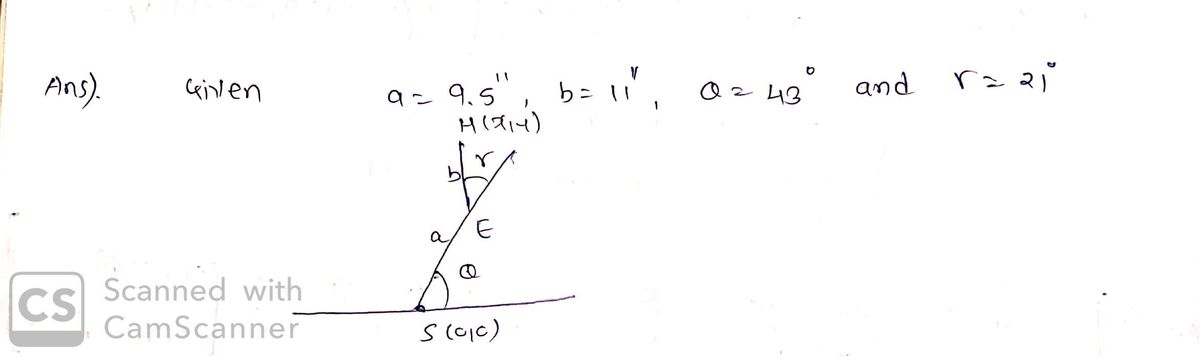
A person’s arm rotates around the shoulder (S) and elbow (E) joint axes. The arm has the
length a = 9 1/2", the forearm has the length b = 11". The shoulder joint angle is θ = 43°. The elbow joint angle is γ = 21°.
a) Compute the Cartesian coordinates of the endpoint H by using a+b.
b) Identify the origin of your reference frame.

Transcribed Image Text:E
Expert Solution
Step 1

Trending now
This is a popular solution!

Step by step
Solved in 2 steps with 2 images
